IROS2020|机器人自主探索与建图算法,代码已开源!

现有机器人需要先建立外部环境的高精地图后,才能完成规划、导航等后续任务。获取高精地图的主要方式是通过人工遥控机器人事先建立地图,地图的精准度依赖于建图工程师的经验。但随着机器人的普及,如扫地机器人等的广泛使用,我们不能再假定用户能建立优质的地图,而需要机器人自主建立高精地图,并用于后续任务中。

图图推荐南京理工大学孔慧教授团队发表在机器人国际顶会IROS2020上的最新论文,论文基于现有的Cartographer建图算法,提高了其边界检测的效率,并开源了集成的机器人自主探索方法。
论文标题:
Frontier Detection and Reachability Analysis for Efficient 2D Graph-SLAM Based Active Exploration
论文作者:
Zezhou Sun, Banghe Wu, Cheng-Zhong Xu, Sanjay E. Sarma, Jian Yang, Hui Kong
录用会议:IROS2020
关键词:SLAM;主动探索;快速边界检测
全文链接:
https://arxiv.org/abs/2009.02869
代码链接:
https://github.com/IMRL/Active-SLAM-with-Cartographer
论文首页:

论文利用Cartographer方法作为基础SLAM模块创建子图并在由图优化引起的几何共对齐子图中执行有效的边界检测,提出一种主动勘探的集成方法。作者还对边界及其集群的可达性进行分析,以确保机器人可以到达检测到的边界。方法在真实室内场景的移动机器人上进行测试,以证明方法的有效性和效率。
论文主要贡献:
在基于图优化的单线雷达子地图中执行的有效边界检测方法
分析边界及其集群的可达性,以确保机器人可以到达检测到的边界
-
使用Cartographer方法作为基础SLAM模块进行主动勘探的集成方法
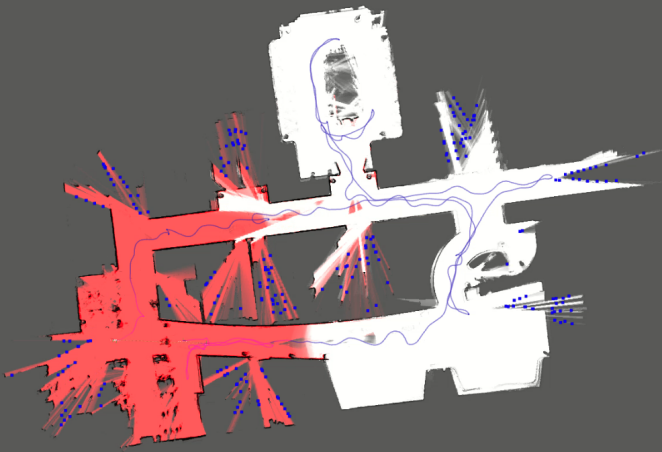
图1:移动机器人建立的室内地图。红色部分对应于进行边界检测的子图,蓝色点为通过论文方法生成的导航点,蓝线是机器人的探索轨迹。
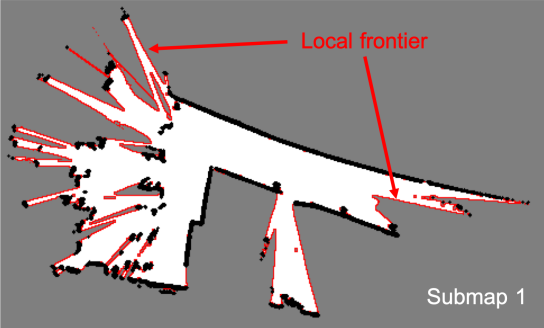
图2:子地图是由多个连续激光扫描组成的子图,红点是在子图上检测到的局部边界。
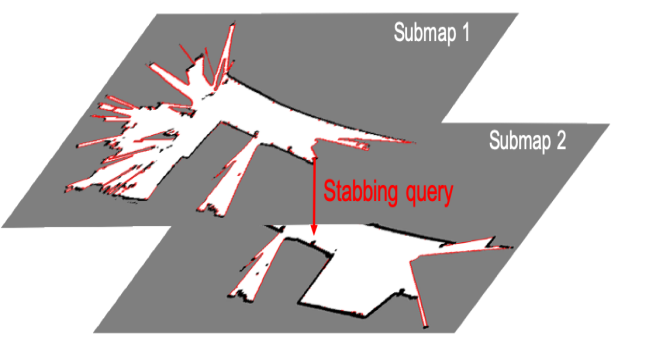
图3:执行穿刺查询。根据世界坐标系中两个子图的姿态,可以计算出子图1中每个局部边界点在子图2中的对应位置。如果子图1中的局部边界点仍然是子图2中的局部边界点或未知点,则将此边界点视为全局边界点(例如,全局图仅由两个子图组成)。否则表示此边界点在子图2中被遮挡。对子图2中的局部边界点执行相同的查询操作。
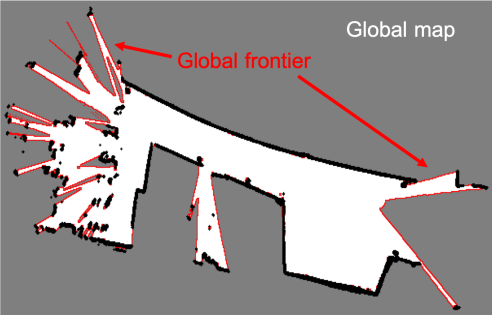
图4:在查询了两个子图的所有局部边界点之后,找到了全局图的全局边界。

图5(a)
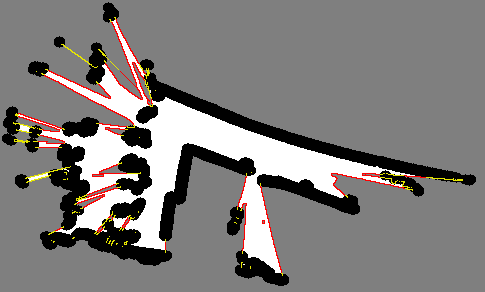
图5(b)
图5:通过子地图膨胀和连通域检查,确保检测到的边界机器人可以到达。
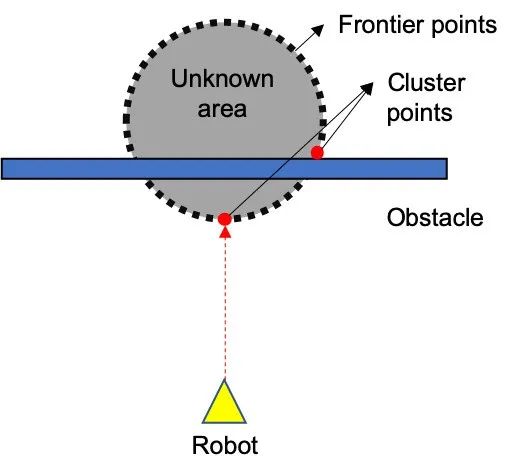
图6:合理对边界进行聚类,确保聚类点可达。
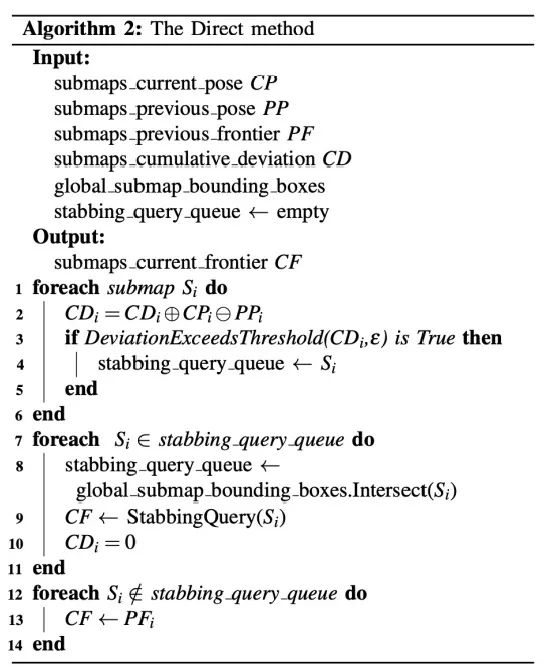
图7:快速边界检测算法。
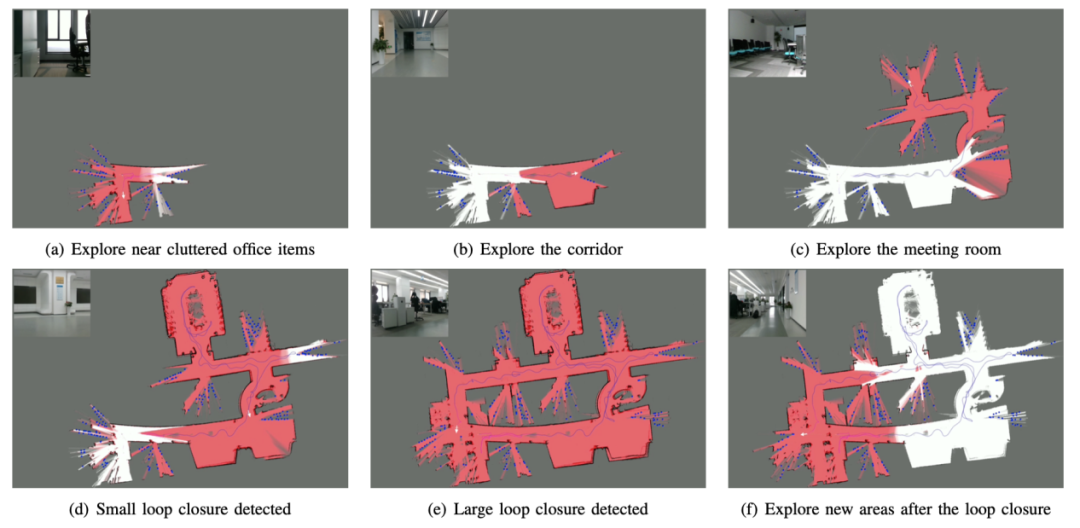
图8:机器人在本地场景的探索过程。
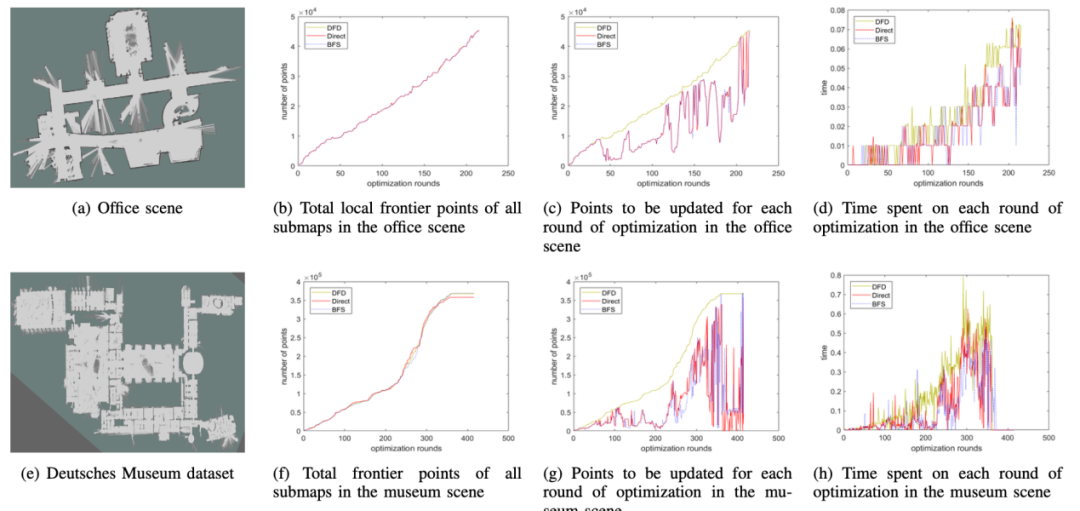
图9:分别在本地环境和公开数据上进行效率对比。

孙泽舟,博士研究生,南京理工大学计算机科学与工程学院,主要研究方向:SLAM,机器人自主导航。

吴邦赫,硕士研究生,南京理工大学计算机学院,主要研究方向:SLAM。
E-mail: banghe_wu@njust.edu.cn

孔慧,教授,博士生导师,南京理工大学计算机科学与工程学院,主要研究领域:机器人视觉,移动机器人自主导航,SLAM,无人驾驶的多传感器融合感知。
南京理工大学智能机器实验室致力于移动机器人的多传感器融合下的无人导航研究和产业落地应用。主要研究方向为机器人视觉、多视几何、激光雷达感知、深度强化学习、机器人主动探索式认知和SLAM。实验室已经和世界著名高校(MIT、法国巴黎高等师范、法国INRIA、新加坡南洋理工大学、澳门大学等)建立了长期稳定的合作关系。
Yaqing Ding, Jian Yang, Jean Ponce, and Hui Kong,Homography-Based Minimal-Case Relative Pose Estimation with Known Gravity Direction,IEEE Transactions on Pattern Analysis and Machine Intelligence,2020
Shuo Gu, Yigong Zhang, Jinhui Tang, Jian Yang, Jose M. Alvarez, and Hui Kong, Integrating Dense LiDAR-Camera Road Detection Maps by a Multi-Modal CRF Model, IEEE Transactions on Vehicular Technology, 2019
Ying Wang, Zezhou Sun, Cheng-Zhong Xu, Sanjay Sarma, Jian Yang, and Hui Kong, LiDAR-Iris for Loop Closure Detection, IEEE International Conference on Intelligent Robotics and Systems (IROS) 2020 (oral presentation)
Zezhou Sun, Banghe Wu, Cheng-Zhong Xu, Sanjay Sarma, Jian Yang, and Hui Kong, Frontier Detection and Reachability Analysis for Efficient 2D Graph-SLAM Based Active Exploration, IEEE International Conference on Intelligent Robotics and Systems (IROS) 2020 (oral presentation)
Mingmei Chen, Le Hui, Jin Xie, Jian Yang and Hui Kong, Cascaded Non-local Neural Network for Point Cloud Semantic Segmentation, IEEE International Conference on Intelligent Robotics and Systems (IROS) 2020 (oral presentation)
Yaqing Ding, Jian Yang, and Hui Kong, An efficient solution to the relative pose estimation with a common direction, IEEE International Conference on Robotics and Automation (ICRA) 2020
Yaqing Ding, Jian Yang, Jean Ponce, and Hui Kong, Minimal solutions to relative pose estimation from two views sharing a common direction with unknown focal length, IEEE International Conference on Computer Vision and Pattern Recognition (CVPR) 2020
Peng Li, Changyong Shu, Yuan Xie, Yanyun Qu, and Hui Kong, Hierarchical Knowledge Squeezed Adversarial Network Compression, AAAI Conference on Artificial Intelligence (AAAI), 2020
Yaqing Ding, Jian Yang, Jean Ponce, and Hui Kong, An efficient solution to the homography-based relative pose problem with a common reference direction, IEEE International Conference on Computer Vision (ICCV) 2019 (oral presentation)
Minghao Liu, Zhixing Hou, Zezhou Sun, Ning Yin, Hang Yang, Ying Wang, Zhiqiang Chu and Hui Kong, Campus Guide: A Lidar-based Mobile Robot, European Conference on Mobile Robotics (ECMR) 2019 (oral presentation)
Shuo Gu, Yigong Zhang, Jose Alvarez, Jian Yang, Hui Kong, Two-View Fusion based Convolutional Neural Network for Urban Road Detection, IEEE International Conference on Intelligent Robotics and Systems (IROS) 2019 (oral presentation)
Yigong Zhang, Yicheng Gao, Shuo Gu, Yubin Guo, Minghao Liu, Zezhou Sun, Zhixing Hou, Hang Yang, Ying Wang, Jian Yang, Jean Ponce, and Hui Kong, DIY your own hybrid thermal/EO camera for autonomous vehicle, IEEE International Conference on Robotics and Automation (ICRA) 2019 (spotlight presentation)
Shuo Gu, Yigong Zhang, Jinhui Tang, Jian Yang, and Hui Kong, Road Detection through CRF based LiDAR-Camera Fusion, IEEE International Conference on Robotics and Automation (ICRA) 2019 (spotlight presentation)
刘盛, 张宇翔, 徐婧婷, 邹大方, 陈胜勇, 王振华. 2020. 复杂场景下视觉先验信息的地图恢复SLAM. 中国图象图形学报, 25(1): 158-170
贾迪, 赵明远, 杨宁华, 朱宁丹, 孟琭. 2019. 面向重复纹理及非刚性形变的像对高效稠密匹配方法. 中国图象图形学报,24(6): 924-933
加入图图社区,获取最新行业资讯

申明:本文发布的网站内容均不代表本号观点,本号旨在提供参考素材以便学习交流。

回放平台
知网平台:
http://k.cnki.net/Room/Home/Index/181822
B站:
https://space.bilibili.com/27032291
往期目录
汪荣贵——机器学习基本知识体系与入门方法
陈强——从Cell封面论文谈AI研究中的实验数据问题
石争浩——从先验到深度:低见度图像增强
行知论坛——南理工行知论坛&图图Seminar:智能画质增强专题
孙显——遥感图像智能分析:方法与应用
章国锋——视觉SLAM在AR应用上的关键性问题探讨
林宙辰——机器学习中优化算法前沿简介
白相志,冯朝路——“医学图像与人工智能”主题论坛
李雷达——以人为中心的图像感知评价:从质量到美学
汪荣贵——深度强化学习系列课程1-4讲
张明敏,郭诗辉——“人工智能与虚拟现实”主题论坛
高连如——高光谱遥感图像处理与信息提取
前沿进展 | 多媒体信号处理的数学理论
中国卫星遥感回首与展望
单目深度估计方法:现状与前瞻
目标跟踪40年,什么才是未来?
10篇CV综述速览计算机视觉新进展
算法集锦 | 深度学习在遥感图像处理中的六大应用
封面故事 | 从传统到深度:火灾烟雾识别综述
封面故事 | 光场数据压缩综述
学者观点 | 结合深度学习和半监督学习的遥感影像分类
编辑推荐 | 视频 + 地图!四维信息助力实景中国
深度学习+图像降噪,如何解决“卡脖子”问题?
专家推荐|高维数据表示:由稀疏先验到深度模型
专家报告 | AI与影像“术”——医学影像在新冠肺炎中的应用
专家推荐|真假难辨还是虚幻迷离,参与介质图形绘制让人惊叹!
学者推荐 | 深度学习与高光谱图像分类【内含PPT 福利】
专家报告|深度学习+图像多模态融合
专家报告 | 类脑智能与类脑计算
实战例题!200+PPT带你看懂监督学习
118页PPT!机器学习模型参数与优化那些事儿~
专家开讲 | 机器学习究竟是什么?
羡慕别人中了顶会?做到这些你也可以!
如何阅读一篇文献?
共享 | SAR图像船舶切片数据集
资源分享| 不知道如何获取最新的算法资讯?快来这里看一看
资源分享|热门IT资讯号推荐
本文系《中国图象图形学报》独家稿件
内容仅供学习交流
版权属于原作者
欢迎大家关注转发!
编辑:秀 秀
指导:梧桐君
审校:夏薇薇
总编辑:肖 亮
声 明
欢迎转发本号原创内容,任何形式的媒体或机构未经授权,不得转载和摘编。授权请在后台留言“机构名称+文章标题+转载/转发”联系本号。转载需标注原作者和信息来源为《中国图象图形学报》。本号转载信息旨在传播交流,内容为作者观点,不代表本号立场。未经允许,请勿二次转载。如涉及文字、图片等内容、版权和其他问题,请于文章发出20日内联系本号,我们将第一时间处理。《中国图象图形学报》拥有最终解释权。




