【泡泡一分钟】自然中的表面法向量(ICCV-2017)
每天一分钟,带你读遍机器人顶级会议文章
标题:Surface Normals in the Wild
作者:Weifeng Chen, Donglai Xiang, Jia Deng
来源:International Conference on Computer Vision (ICCV 2017)
编译:李建禹
审核:颜青松 陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

本文研究了自然图像的单图像深度估计问题。本文收集人类标注的表面法向量,并使用它们来帮助训练神经网络,直接预测像素的深度。本文提出了用标注的表面法向量训练的两个新的损失函数。通过对NYU深度图、KITTI以及我们自己的数据集的实验表明,本文的方法可以显著提高自然图像中深度估计的质量。
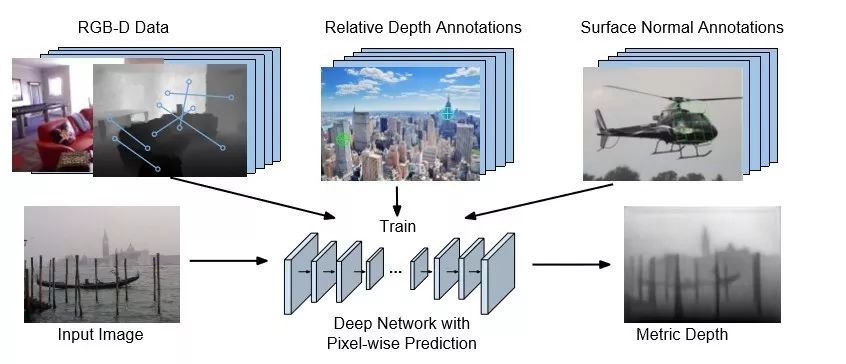
图1 本文的训练图像与输出

图2 从SNOW数据集的标注表面法向量的一些示例。表面法线绘制为红色箭头,切线平面为绿色网格。
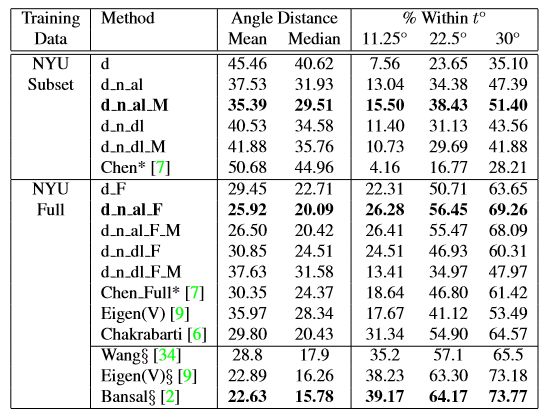
图3 在NYU深度数据集上评估的表面法线误差。

Abstract
We study the problem of single-image depth estimation for images in the wild. We collect human annotated surface normals and use them to help train a neural network that directly predicts pixel-wise depth. We propose two novel loss functions for training with surface normal annotations. Experiments on NYU Depth, KITTI, and our own dataset demonstrate that our approach can significantly improve the quality of depth estimation in the wild.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com


