【泡泡一分钟】学习多视图相似度(ICCV-2017)
每天一分钟,带你读遍机器人顶级会议文章
标题:Learned Multi-Patch Similarity
作者:Wilfried Hartmann, Silvano Galliani, Michal Havlena, Luc Van Gool, Konrad Schindler
来源:International Conference on Computer Vision (ICCV 2017)
编译:王嫣然
审核:颜青松 陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

从场景的多个视图估计深度图是计算机视觉中的基本任务。若有两个以上的视图可用,就会面临一个常见的问题,即如何测量两个以上图像块之间的相似性。然而,现阶段没有直接解决该问题的方案,通常的做法是回归到使两视图相似性稳定的平均值。
受到机器学习,特别是卷积神经网络成功的影响,本文提出学习一种匹配函数,该函数直接将多个图像块映射到标量相似度得分。在几个多视图数据集上的实验表明,该方法优于基于成对视图块相似性的方法。
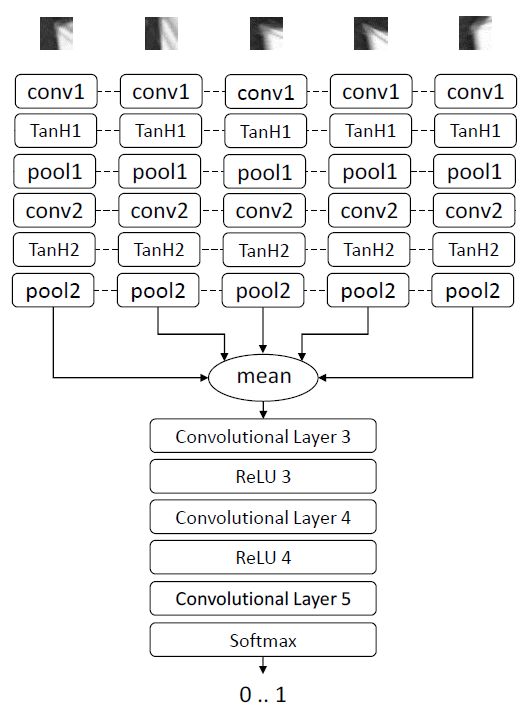
图1 本文所提出的的网络架构有5个分支,输入为5个图像块,输出为用于选择正确深度值的相似度得分。
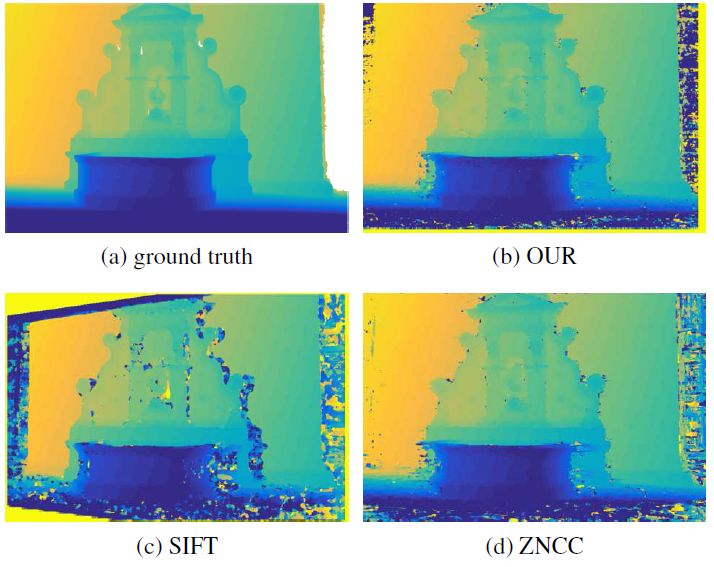
图2 三种不同方法实验深度图对比

Abstract
Estimating a depth map from multiple views of a scene is a fundamental task in computer vision. As soon as more than two viewpoints are available, one faces the very basic question how to measure similarity across >2 image patches. Surprisingly, no direct solution exists, instead it is common to fall back to more or less robust averaging of two-view similarities. Encouraged by the success of machine learning, and in particular convolutional neural networks, we propose to learn a matching function which directly maps multiple image patches to a scalar similarity score. Experiments on several multi-view datasets demonstrate that this approach has advantages over methods based on pairwise patch similarity.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




