仿生电子鼠会做灾后搜救了:载重物爬窄管不在话下,跌倒还能自己站起来丨北理工出品
Alex 发自 凹非寺
量子位 | 公众号 QbitAI
狭窄、多弯道的空间难以探测?
一只来自北理工的机器小鼠SQuRo对此给出否定答案。
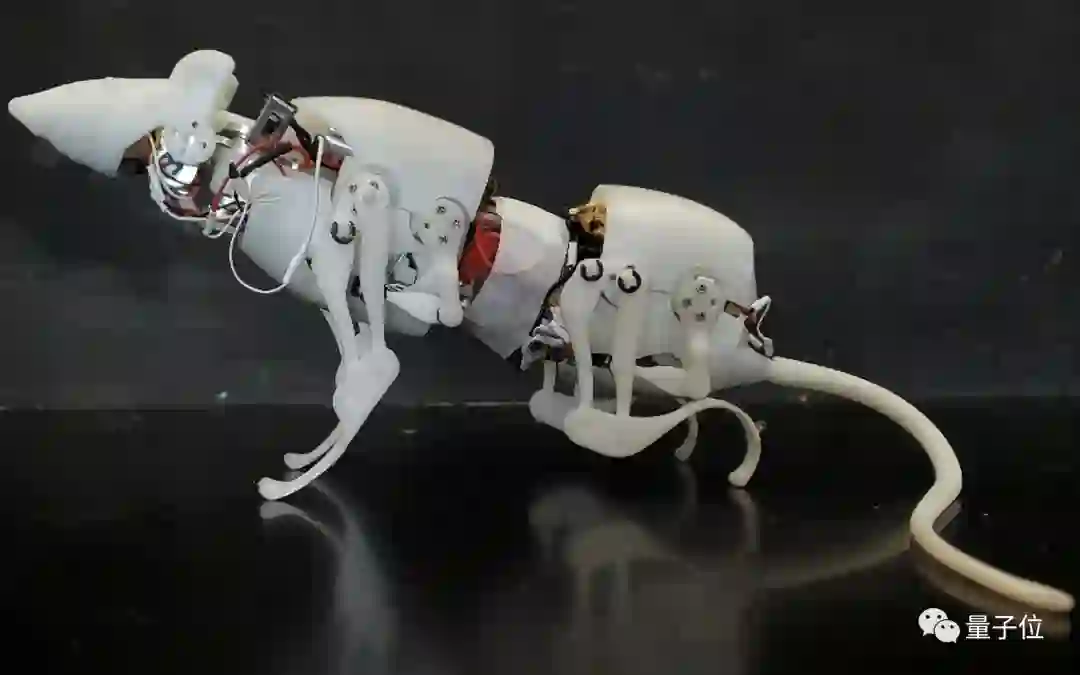
它不仅能在狭小空间内灵活穿行,轻松完成各种运动并进行变换,如蹲下起立、行走、爬行等,简直是应对突发灾情或狭窄管道的“神器”:

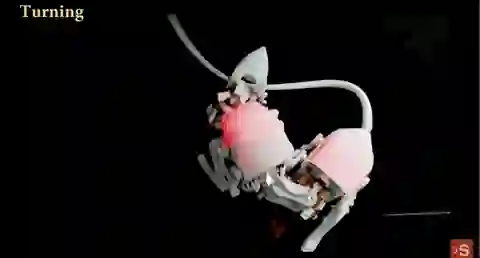
还能在不足自己身长一半的小半径内快速转身,咬住自己的尾巴360°转圈(半径比其他机器人小得多):
甚至还很坚强,可以在跌倒后迅速站起来。

最关键的是,这只小鼠还很能载重——目前它已经能成功地带着一个占自重91%(200克)的重物,通过有20°倾角的场地。
(想象一下你背着和自己差不多重的一个包爬坡上坎的感觉……)
研究成果论文的第一作者,北理工石青教授表示,目前市面上有不少足式机器人,但大多不擅长应对狭窄空间:
大型四足机器人运输能力强,但不能进入狭窄的空间;微型四足机器人虽然可以进入狭窄空间,但其携带重物的能力有限。
这项来自北理工的研究成果,目前已经发表在IEEE旗下期刊上。
见识到这只机器小鼠出色的敏捷性和载荷能力后,再来深入了解一下吧!
灵感来自不惧狭窄弯道的老鼠
此前,鲜有人给体重小于1公斤的小型四足机器人设计能规划运动的多模态控制框架。
多模态控制是指随系统运行状态而不断变化策略的控制方式,可以实时选用最合适的控制算法,并选择恰当时机进行切换,使系统更加稳定、准确、反应迅速。
由于规模限制,小型机器人的硬件组件很少,这导致了其低感知和处理能力较弱。
另外,现有的机器人研究主要集中于动态稳定性和机械约束,而忽略了与某种机器人相似生物的运动特征。
研究人员发现,老鼠在各种狭窄复杂的环境中运动十分敏捷,于是他们准备从生物角度出发,在老鼠身上“取取经”。
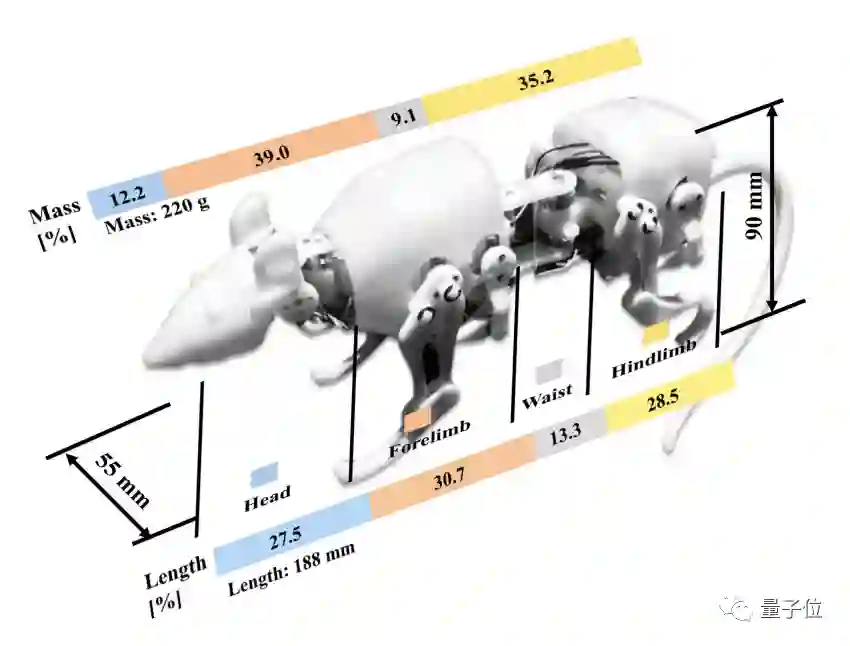
首先,用X光片记录下老鼠运动中的骨骼结构以提取关键运动关节,然后建立了四足机器小鼠的基本模型。
机器小鼠SQuRo的质量为220克,和八周大的黑毛鼠体重的相似;它的体长也和真老鼠差不多。
北理工团队还赋予了这只机器小鼠多模态运动规划和控制框架,使其能够感知和处理复杂的现实环境。
根据老鼠运动的3大能力设计基本结构
研究团队据X光片分析发现,老鼠主要靠这三个主要功能,来组合做出各种运动:
肢体运动
脊柱屈伸和侧向弯曲
颈椎运动
于是,研究人员为机器老鼠配置了12个活动自由度(四肢各有2个自由度,腰部2个屈伸自由度,颈部2个自由度),以及4个被动自由度,以模仿关节的屈伸和转动。
自由度是独立变量的个数。具体而言,若总变量个数为N,约束条件个数为M,则自由度F=N-M。

机器小鼠的四肢结构设计示意图如下:
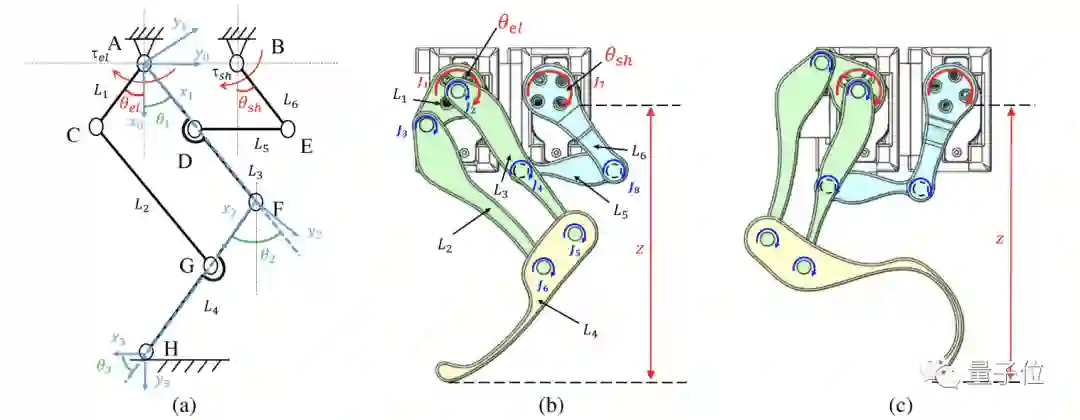
图a、b分别为左前肢的机构运动简图和骨架模型结构;c为左后肢的骨架模型侧视图。
相比前肢,后肢的底部为一个更弯曲的杆,以提供更大的前推力——这与老鼠主要依靠后肢产生推力的现象一致。
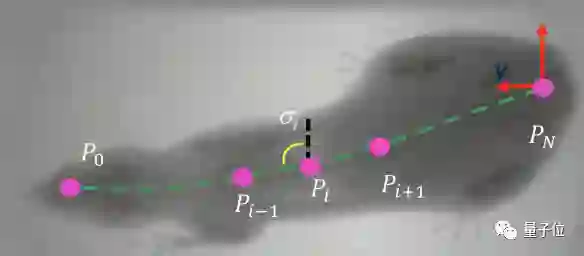
研究者分析老鼠行为发现,它的转身运动是从头部到躯干,再到臀部,逐步发力的。
受益于灵活的脊柱,老鼠可以迅速变换方向。
小鼠的颈椎由好几节构成,其中第一节颈椎的旋转角反映了头部和躯干之间的角度。
下面的关节旋转角度图中,有三个峰值,对应三个最明显的运动,即:颈椎屈伸、
前肢第二胸椎的屈伸运动,和第十三胸椎的后肢屈伸运动。
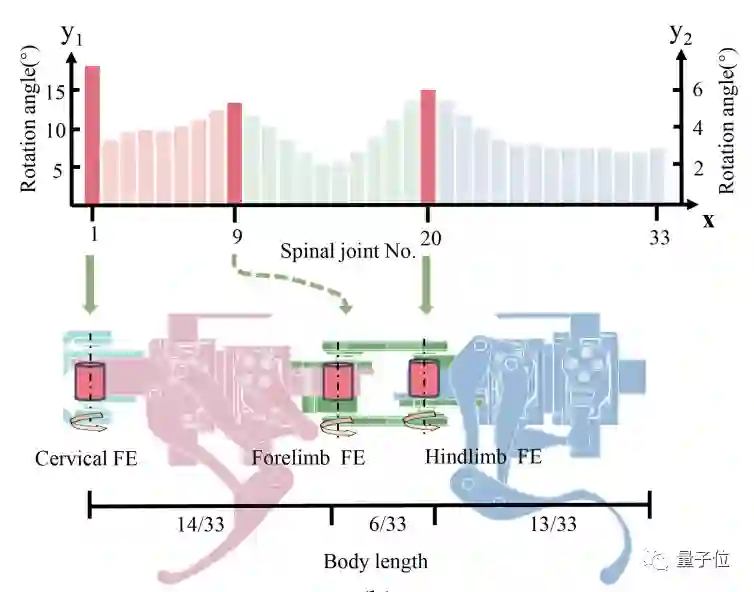
因此,研究者为脊柱配备了三个关于屈伸的主动自由度,用于机器小鼠的正面转弯运动。
由于颈部旋转在老鼠的日常活动中很少见,所以真老鼠的颈部活动对设计探测机器人来说,意义不大。
研究者配置了一个用于颈部屈伸的主动自由度,和一个用于颈部内收的主动自由度,这两个自由度都位于头部和躯干的连接处。
机器小鼠共有33个脊椎关节,研究者将后肢屈伸的关节设置于第22个关节处,这与老鼠的对应的关节位置相似。
研究团队介绍
这项研究来自北京理工大学。
论文一作石青,现任北京理工大学教授、机电工程学院智能机器人研究所副所长,本科毕业于北理工,博士毕业于早稻田大学,并于早稻田大学进行博士后工作,主要研究方向是仿生机器人、生机电融合。

这篇论文由石青导师黄强、中科院外籍院士福田敏男,以及石青带领的仿生机器人团队共同完成。
团队研究的仿生鼠,曾被昆士兰大学计算机教授Janet Wiles评价称“达到业界SOTA水平”。
团队表示,未来还将通过闭环控制和深入动态分析等方法,来进一步提高机器小鼠的敏捷性,并且有兴趣将其商业化。
你觉得这只机器小鼠还能被用在哪些地方呢?
论文地址
https://ieeexplore.ieee.org/document/9751239
参考链接:
[1] https://spectrum.ieee.org/robotic-rat-climbs-crawls-turns
[2] https://www.thepaper.cn/newsDetail_forward_15922015
— 完 —
「人工智能」、「智能汽车」微信社群邀你加入!
欢迎关注人工智能、智能汽车的小伙伴们加入我们,与AI从业者交流、切磋,不错过最新行业发展&技术进展。
ps.加好友请务必备注您的姓名-公司-职位哦~
点这里👇关注我,记得标星哦~
一键三连「分享」、「点赞」和「在看」
科技前沿进展日日相见~


