机器人医生STAR给猪做锁眼手术!83%的自主缝合任务完美完成
新智元报道
新智元报道
编辑:桃子 拉燕
【新智元导读】近日,美国约翰斯·霍普金斯大学的研究人员设计了一个智能组织自主机器人STAR。在没有人类指导的情况下,机器人成功对猪的软组织进行了腹腔镜手术,比人类医生更快准狠。
近日,美国约翰斯·霍普金斯大学的研究人员设计了一个智能组织自主机器人STAR。
在没有人类指导的情况下,机器人STAR成功对猪的软组织进行了腹腔镜手术,又称锁眼手术(keyhole surgery)。

目前,该研究已在Science子刊发表。

论文地址:https://www.science.org/doi/10.1126/scirobotics.abj2908
这个机器人在猪的身上执行手术,意味着离人体实验就不远了。研究人员称,这是向人体试验迈出的重要一步。
83%缝合,STAR全搞定
其实,少数手术早已实现了自动化,然而这些机器人往往在执行硬组织相关的手术熟练有度,比如骨科手术。
那如果让它们自主去执行软组织等手术,那就有可能拿捏不住了。
即使对于人类医生来说,腹腔镜手术也是一个挑战,比如,在胃部不做大切口的情况下重新连接肠道。
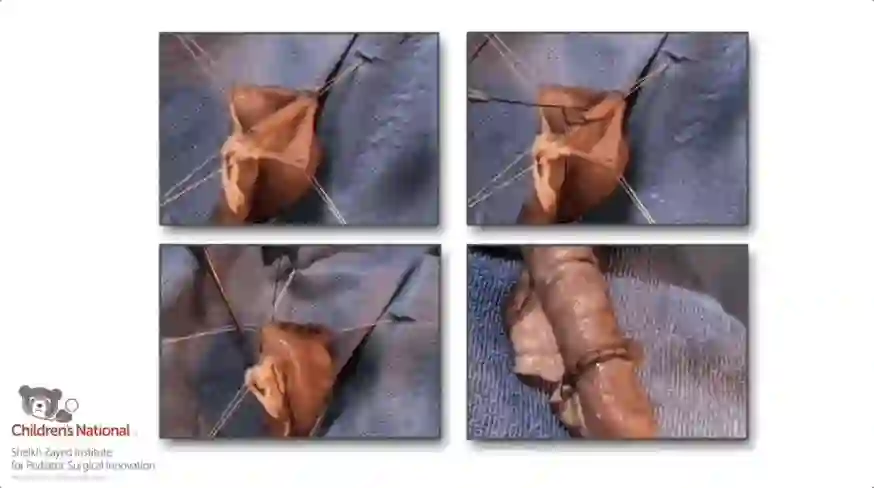
为此,约翰·霍普金斯大学的Justin Opferman和他的同事们设计的智能组织机器人在有限的人工干预下,切除一段肠子后将其成功连接。

手术中,这个机器人给4头猪做了手术,总共缝了86针。
其中,手术三分之二的时间,机器人会自动缝合,而其余的三分之一,在尝试缝合之前,机器人需要医生去引导到位。
据介绍,83%的缝合任务,都是使用该工作流程自主完成,不过该系统也需要手动进行调整以纠正漏针的位置。

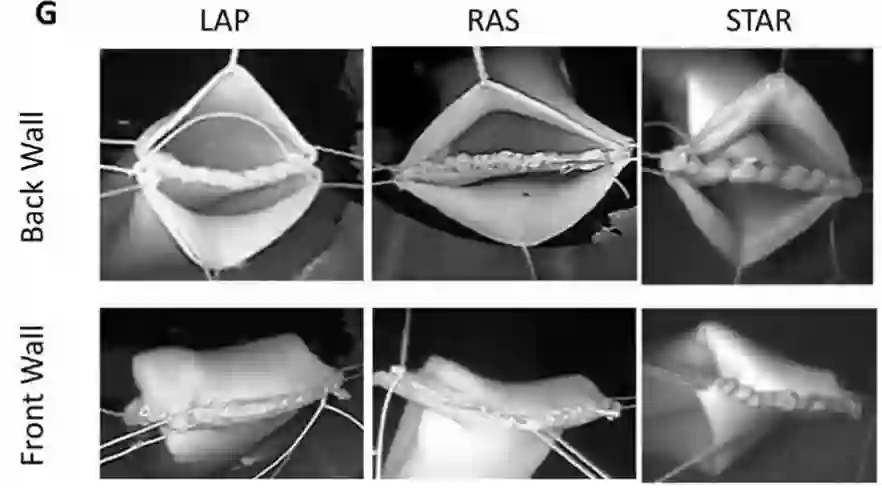
结果显示,STAR机器人做的手术明显优于人类做的手术。
其实,早在2016年,同一组科学家就给这个机器人写了个程序,让机器人给猪做手术。他们让机器人执行了将猪的肠子拉出体外,然后再缝合的操作。
而这次,机器人通过一个小开口,成功在狭窄的腹部完成了任务。这次的手术更具挑战性,因为器官会随着动物的呼吸有节奏地动。
Opferman 表示,「一旦你打开病人的身体,他体内所有的器官都会在动,所以你不太可能提前做好类似于往哪里下刀的计划。」
「如果你要手术的对象是像肠子这样的软组织,你一碰它,它也会跟着跑。因此,需要实时更新机器人的计划,弄清楚它需要做什么,以及如何完成任务。」
如果机器人能够擅长肠道吻合术,这将是一种需要高水平重复运动和精确度的手术。

要知道,连接肠道的两端可说是胃肠手术中最具挑战性的步骤,需要外科医生以高精度和一致性进行缝合。
即使是最轻微的手部颤抖或缝线错位,也可能导致泄漏,而这可能会给患者带来灾难性的并发症。
STAR机器人如何设计?
STAR机器人系统的组成部分,包括医用机械臂、外科手术工具、双通道NIR和3D结构光内窥镜成像系统。其中,标准机械臂是由制造商Kuka所提供。
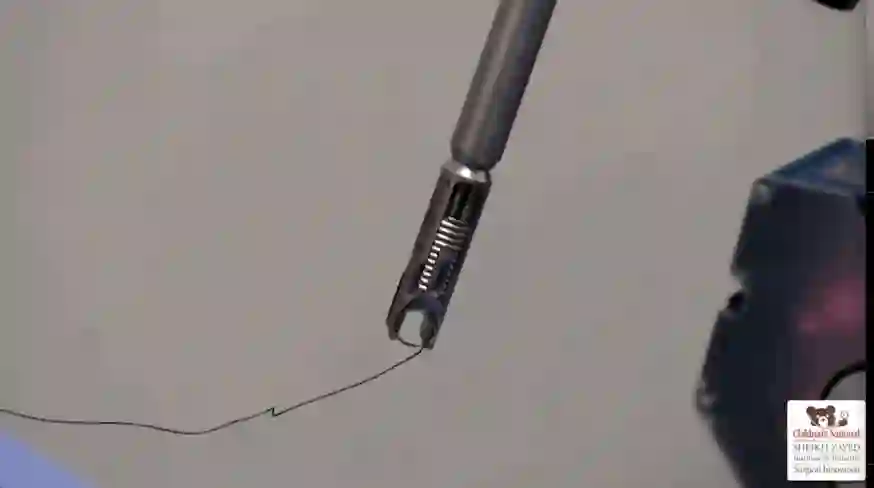
研究人员表示,STAR其实是一种专门用于缝合软组织的视觉引导系统。
团队为STAR配备了增强自主性和提高手术精度的新功能,包括专门的缝合工具和最先进的成像系统,以提供更准确的手术区域可视化。
定制的软件在缝合的过程中控制机器人,使用机器人手臂上的3D摄像头拍摄图像,以此来感知机器人在体内的深度,并绘制病人腹部内部变化的情况。

STAR增强自主控制策略的体系结构
这套自主性流程能够让机器人启动/暂停/解除组织跟踪系统,检测组织的呼吸运动及其变形。
通知医生重新规划步骤,控制摄像机运动,以均匀和非均匀间距进行不同模式的缝合规划,预先过滤降低噪声,预测工具与组织的距离,以及使机器人工具与组织的呼吸运动和远程运动中心(RCM)下的同步。
未来5年,机器人上手
其实,机器人辅助手术在世界各地已经非常常见。据估计,2017年机器人辅助手术的数量超过64.4万例,但它们都是辅助手术。
正如刚刚提到,软组织手术对机器人来说尤其困难,因为它的不可预测性迫使机器人要快速适应以应对意外的障碍。

约翰斯·霍普金斯大学的研究人员为STAR设计了一个新颖的控制系统,可像人类外科医生一样实时调整手术计划。
STAR的特别之处在于,它是第一个以最少的人工干预来规划、调整和执行软组织手术计划的机器人系统。
Opferman说,这项试验是人类实现完全自主手术的第一步,尽管距离实现这一终极目标可能还需要几十年的时间。

随着研究成果的不断进展,研究小组将训练机器人慢慢地操作越来越多的手术部分,比如打开空腔,然后关闭,直到证明机器人自己能够独立完成整个操作过程。
他说,「由机器人执行部分手术的人体试验可能在5年内开始。」






