未来科技发展的趋势是什么?或许可以实现“衣来伸手”。
当然,这种便捷(yang zhu)般的生活方式不建议小伙伴们轻易尝试,否则你可能会体会到老母亲/老父亲“爱的教育”。
所以我们还是把目光放到真正的受众人群上。事实上,无论是因为受伤,永久性残疾亦或是其他因素。每天,世界各地都有许多人需要在帮助下才能穿好衣服。
早在去年,来自麻省理工学院的研究人员就设计了一款可以帮人穿衣服的机器人。但彼时的机器人只能选择无袖的衣物。
时隔一年,这次,他们将目光放在了使机器人辅助人类穿有袖的衣物上。该论文于 2022 年 4 月发表在IEEE Robotics and Automation上。
其实,无袖和有袖之间的研发难题,在于后者的“视觉遮挡”情况,该论文的主要作者表示,“机器人在整个穿衣过程中看不到人的手臂。” 特别是,它不能总是看到肘部或确定其精确位置或方位。反过来,这会影响机器人将衣服(例如长袖衬衫)从手拉到肩膀时所必须施加的力。”
为了解决视力障碍的问题,麻省理工学院计算机科学与人工智能实验室 (CSAIL) 的科学家创建了一种新算法——状态估计算法。
无论你的胳膊肘是伸直还是弯曲,向上、向下或侧向——即使它完全被衣服遮住,它们都能够对肘部的位置以及手臂的倾斜方式做出合理精确的猜测。
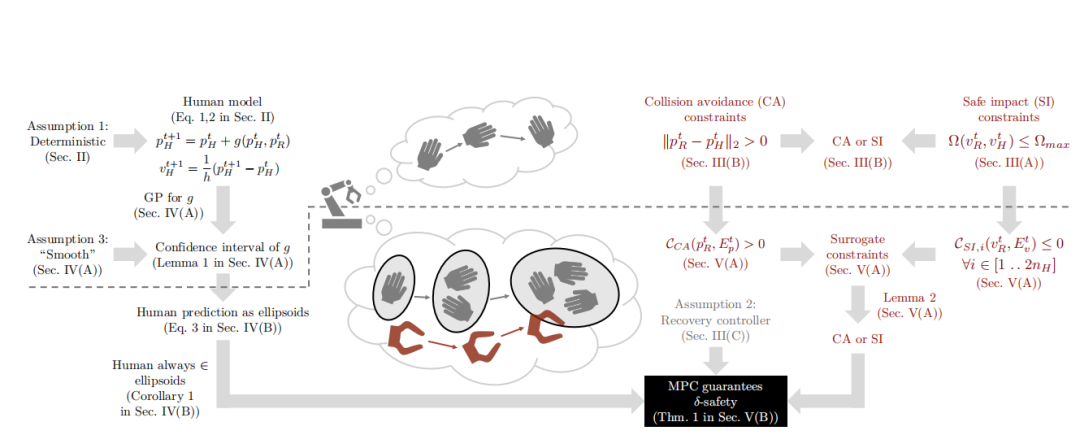
在每个时间实例中,该算法都将机器人对施加在布料上的力的测量值作为输入,然后估计肘部的位置——不是精确的,而是将它放在一个包含所有可能位置的盒子或体积内。
反过来,这些知识会告诉机器人如何移动,Stouraitis 说。“如果手臂是直的,那么机器人将沿着直线运动;如果手臂弯曲,机器人将不得不绕肘弯曲。” 他补充说,获得可靠的图片很重要。“如果肘部估计错误,机器人可能会决定一个会产生过度且不安全的力的运动。”
该算法包括一个动态模型,可以预测手臂在未来将如何移动。
同时,每个预测都通过测量在特定时间施加在布料上的力来校正。
相比其他研究人员已经做出的状态估计预测,麻省理工团队的研究人员可以为不确定性设定一个明确的上限,并保证肘部将在规定的盒子内。
在实验中,他们通过穿着“Xsens”动捕套装用于训练机器学习系统数据。
这款动捕套装带有可准确跟踪和记录身体运动的内置传感器。
机器人经过训练后,它能够推断出在将夹克穿在人类受试者身上时的肘部姿势,该受试者在手术过程中以各种方式移动手臂——有时是为了响应机器人拉动夹克,有时是参与他自己的随机动作。
这项工作严格专注于尽可能准确识别肘部和手臂姿势的位置,
但目前团队已经进入下一个研发阶段:开发一种能够不断调整其动作以响应身体变化的机器人——手臂和肘部方向。
未来,该团队计划解决“个性化”问题——开发一种能够解释不同人移动方式的机器人。
他们设想机器人具有足够的多功能性,以及更广泛的用途,比如可以处理各种不同的布料材料,每种材料对拉动的反应都可能有所不同。
“我们并没有以任何方式专门化这种算法,使其仅适用于机器人穿衣,”李指出。“我们的算法解决了一般的状态估计问题,因此可以适用于许多可能的应用。
也许在不久的将来,你可以想象:这个机器人可以摆好餐桌,帮你清理孩子留在地板上的积木,将它们摆放整齐。然后帮助你穿上晚礼服,将盘子端到餐桌上,让你享受愉悦的晚餐。
目前,这项研究得到了美国海军研究办公室、艾伦图灵研究所和本田欧洲研究所的支持。
https://arxiv.org/abs/2110.09584
https://news.mit.edu/2022/robots-dress-humans-without-full-picture-0405