【泡泡一分钟】利用多相机系统实现鲁棒的视觉里程计
每天一分钟,带你读遍机器人顶级会议文章
标题:Towards Robust Visual Odometry with a Multi-Camera System
作者:Peidong Liu, Marcel Geppert, Lionel Heng, Torsten Sattler, Andreas Geiger, and Marc Pollefeys
来源:2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
编译:张鲁
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

本文我们提出了一种用于多相机系统和可在复杂环境中稳定运行的视觉里程计算法。
我们的算法包括一个位姿跟踪模块和一个局部建图模块。跟踪模块通过最小化光度误差来估计当前帧和最近关键帧的相对位姿。建图模块使用平面扫描法(plane-sweeping stereo)来初始化所有采样特征点的深度信息。
为了减少位姿漂移,我们使用了一个滑窗优化器来同时改进相机位姿以及环境结构。我们的方法具有足够的灵活性来支持任意数量的立体视觉相机。
我们在5个数据集上详尽地评估了本文算法。这些数据集采自不同的环境条件:白天、使用近红外(NIR)光照的夜间以及不使用近红外光照的夜间。实验结果表明多相机系统能够使得视觉里程计对复杂环境更加鲁棒,尤其是在夜间环境下,使用单个立体相机会由于缺乏特征点使得系统非常容易失效。
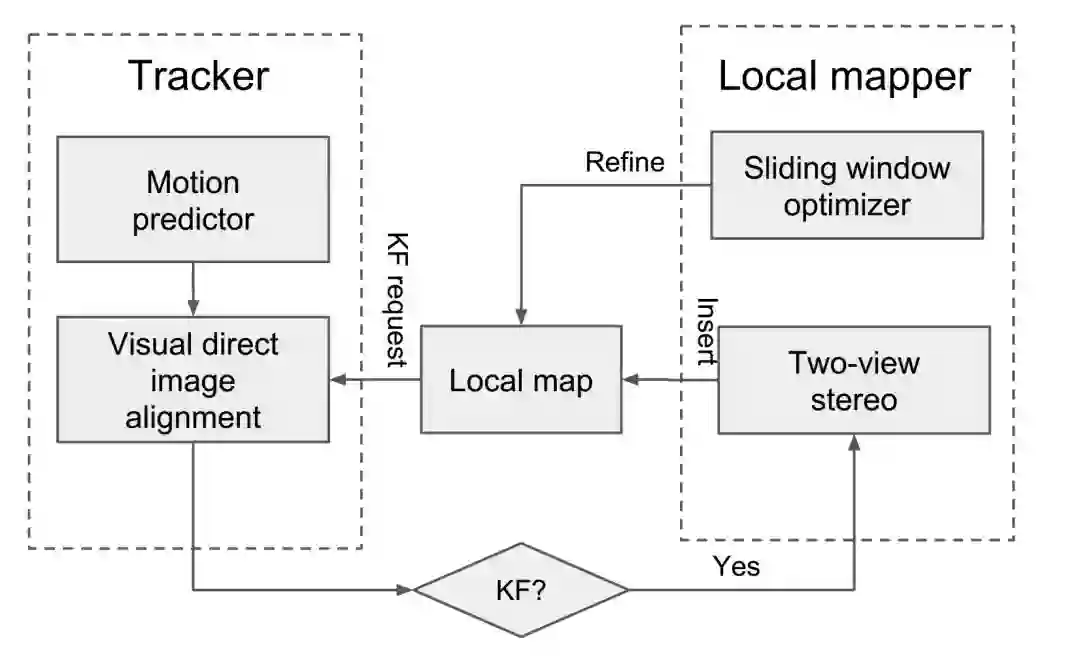
图1 本文提出的视觉里程计系统流程框图

图2 实验车辆照片
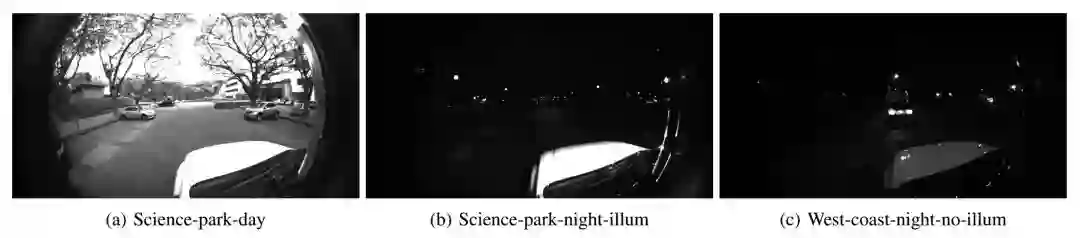
图3 数据集中的三张样张,图片展示了数据集中存在的非常有挑战性的场景包括剧烈的畸变以及夜晚场景特征缺失

图4 在5个数据集上的测试轨迹(上左:west-coast day dataset,上右:west-coast-night-illum dataset,下左:science-park-day dataset,下中:science-park-night-illum dataset,下右:science-park-night dataset)

Abstract
We present a visual odometry (VO) algorithm for a multi-camera system and robust operation in challenging environments. Our algorithm consists of a pose tracker and a local mapper. The tracker estimates the current pose by minimizing photometric errors between the most recent keyframe and the current frame. The mapper initializes the depths of all sampled feature points using plane-sweeping stereo. To reduce pose drift, a sliding window optimizer is used to refine poses and structure jointly. Our formulation is flexible enough to support an arbitrary number of stereo cameras. We evaluate our algorithm thoroughly on five datasets. The datasets were captured in different conditions: daytime, night-time with near-infrared (NIR) illumination and nighttime without NIR illumination. Experimental results show that a multi-camera setup makes the VO more robust to challenging environments, especially night-time conditions, in which a single stereo configuration fails easily due to the lack of features.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com