【泡泡图灵智库】GCNv2:高效关联预测实时SLAM(arXiv)
泡泡图灵智库,带你精读机器人顶级会议文章
标题:GCNv2: Efficient Correspondence Prediction for Real-Time SLAM
作者:Jiexiong Tang, Ludvig Ericson, John Folkesson
来源:arXiv
编译:万应才
审核:李雨昊
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

在本文中,我们提出了一个基于深度学习的网络——GCNv2,用于生成关键点和描述符。GCNv2建立在我们以前的方法GCN的基础上,这是一个为三维投影几何训练的网络。GCNv2采用二进制描述符向量作为ORB特性,因此它可以在ORB-SLAM等系统中轻松替换ORB。GCNv2显著提高了只能在桌面硬件上运行的GCN的计算效率。我们将展示如何使用GCNv2功能在嵌入式低功耗平台Jetson tx2上运行ORB-SLAM的修改版本。实验结果表明,GCNv2的精度与GCN基本相同,且具有足够的鲁棒性,可用于无人机的控制。
Code:https://github.com/jiexiong2016/GCNv2_SLAM
主要贡献
1.GCNv2保持了GCN的准确性,与相关的基于深度学习的特征提取方法和经典方法相比,在运动估计方面提供了显著的改进。
2.与需要桌面GPU进行实时推理的GCN相比,GCNv2的推理可以在嵌入式低功耗硬件(如Jetson TX2)上运行。
3.作者设计的GCNv2具有与ORB功能相同的描述符格式,以便它可以作为SLAM系统(如ORB-SLAM 2或SVO2中的关键点提取程序)中的替代项。
4.作者用GCN-SLAM1在一架真实的无人机上进行控制,证明了我们工作的有效性和鲁棒性,并表明它能处理ORB-SLAM2失效的情况。
算法流程
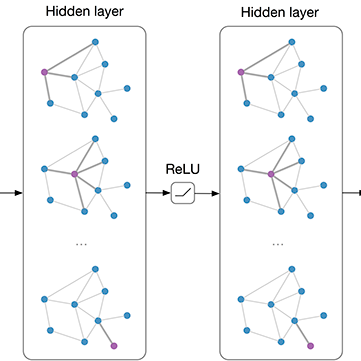
1.Neural network
作者之前提出的GCN结构由两个主要部分组成:一个带有resnet-50主干的FCN结构和一个双向卷积网络。虽然与现有方法相比,GCN具有令人印象深刻的跟踪性能,但在硬件有限的实时SLAM系统中,GCN具有实际局限性。针对这些问题作者提出了我们部署了一个参数更少的网络,其规模比叠加还要小。直观地说,网络对原始图像中16×16像素大小的每个网格单元执行单独的预测。
2.Feature Extractor
作者将GCNv2的特征训练为二进制,以加速匹配过程并与ORB的特征匹配。为了对这些特性进行二值化,我们在最终输出的顶部添加了一个二进制激活层。为了让通过网络的这一层正确地反向传播损失作者定义了符号函数:
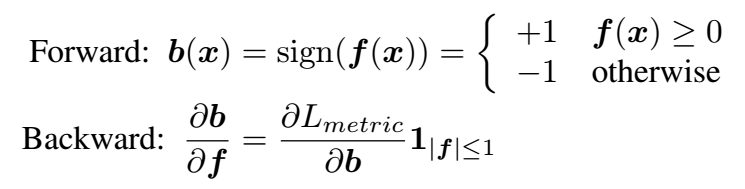
特征映射数f大小设置为256,使描述符具有与ORB特征相同的位宽度,以便将描述符直接合并到现有的基于ORB的视觉跟踪系统中。
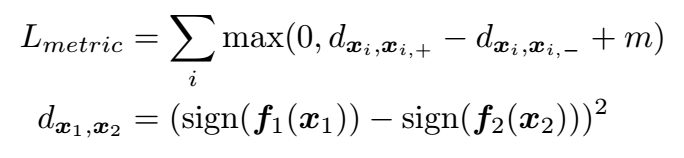
像素度量学习用于以最近邻方式训练描述符。二值化特征的三重损失如下:
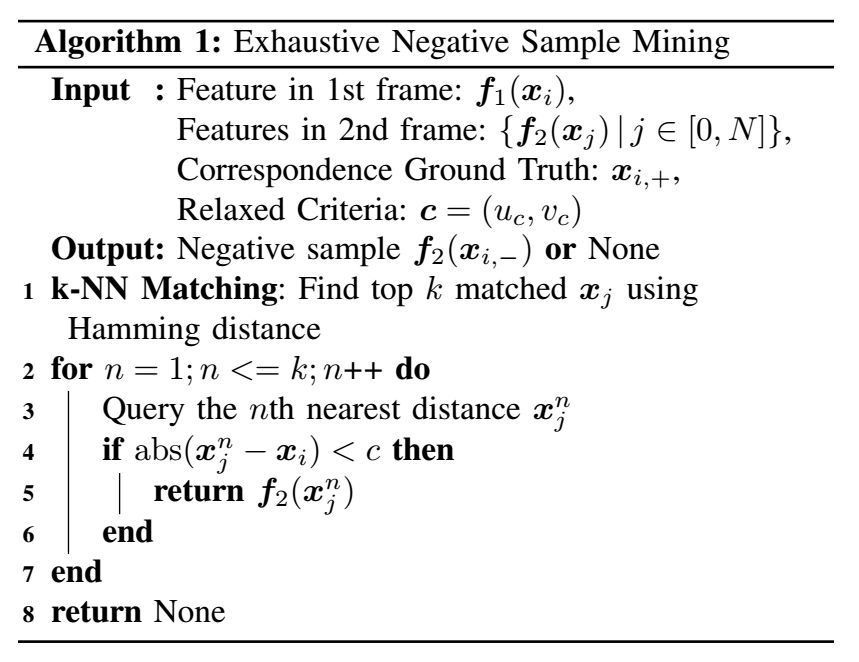
3.Distributed Keypoint Detector
关键点检测的训练损失与原始GCN相同。使用以下两个连续帧计算

SuperPoint 试图实现类筛角检测,其性能的提高主要归功于其优良的描述符。然而,CNN能够产生比传统方法更具有代表性的特征,接收场更大。因此,我们通过检测16x16网格中的Shi-Tomasi角来生成地面实况,并使用以上方程进行估计。
4.GCN-SLAM与ORB extractor 对比
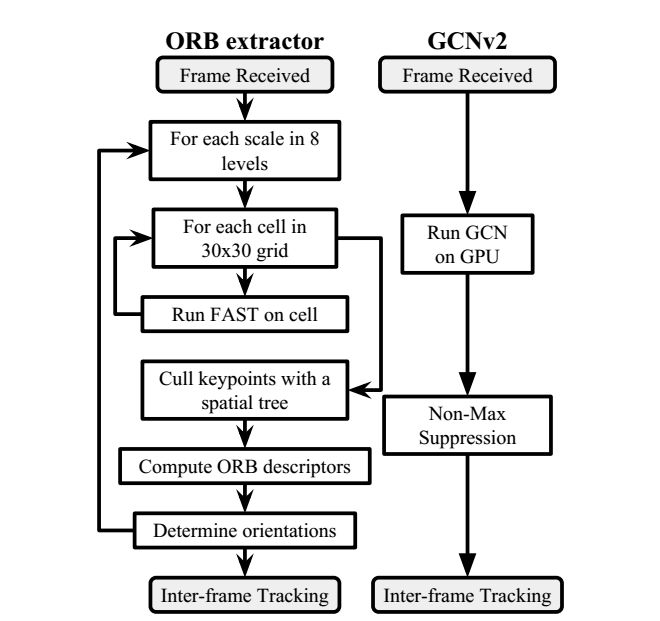
图1 ORB extractor与GCNv2对比
GCN对于在SLAM中中所针对的嵌入式硬件的实时使用是非常昂贵的。在GCNv 2中,向网络输入一个单一的灰度图像帧,输出两个矩阵:1×320×240键盘掩码和256×320×240特征描述矩阵。关键点掩码被阈值化为OBT。 AIN一组KeyPoint位置、它们的机密性以及相应的256位特征描述符。还用标准的近邻搜索代替了匹配算法。这些修改是为了检验我们的关键点提取方法的性能,而不是ORB-SLAM2的其他跟踪启发式方法的性能。
主要结果
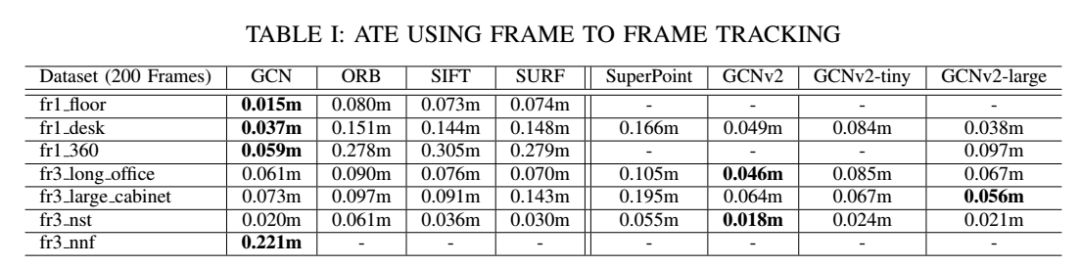
1.与其他算法对比特征跟踪精度
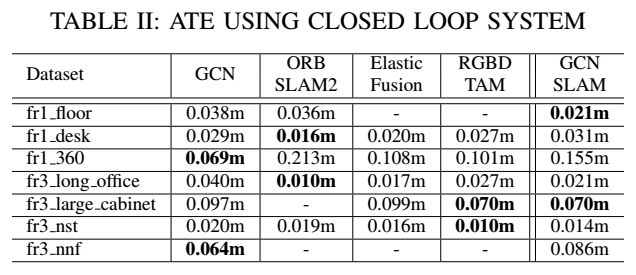
2.回环检测精度
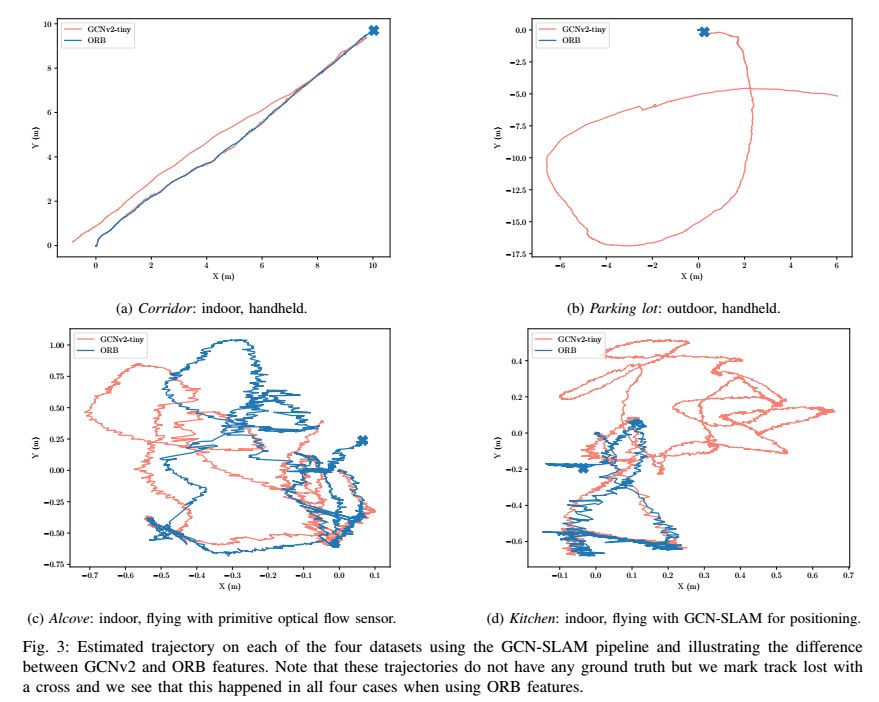
4.建图效果


Abstract
In this paper, we present a deep learning-based network, GCNv2, for generation of keypoints and descriptors.GCNv2 is built on our previous method, GCN, a network trained for 3D projective geometry. GCNv2 is designed with a binary descriptor vector as the ORB feature so that it can easily replace ORB in systems such as ORB-SLAM. GCNv2 significantly improves the computational efficiency over GCN that was only able to run on desktop hardware. We show how a modified version of ORB-SLAM using GCNv2 features runs on a Jetson TX2, an embdded low-power platform. Experimental results show that GCNv2 retains almost the same accuracy as GCN and that it is robust enough to use for control of a flying drone.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com