【泡泡一分钟】利用欠约束的landmarks实现成像声呐基于特征的SLAM
每天一分钟,带你读遍机器人顶级会议文章
标题:Feature-Based SLAM for Imaging Sonar with Under-Constrained Landmarks
作者:Eric Westman, Akshay Hinduja, and Michael Kaess
来源:2018 IEEE International Conference on Robotics and Automation (ICRA)
编译:杨雨生
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

最近的研究表明,利用声呐可以在水下实现基于特征的SLAM。但是之前的算法,或是依赖人工进行特征提取和匹配,或是利用场景的先验信息,比如假设场景是平面。我们提出一种通用的算法,能够实现任意场景下的特征提取和匹配。除此之外,我们提出一种算法能够识别出具有良好约束的特征点,从而实现更可靠的重建。最后,我们证实尽管欠约束的特征点自身无法实现准确的重建,这些特征点仍可以用来约束并校正声纳的运动。这些成果表明,成像声纳在基于特征的SLAM方向迈出了一大步。
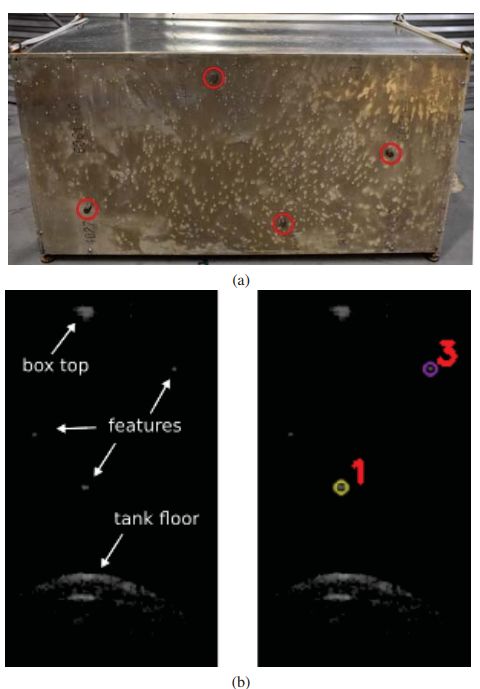
图1 上图(a)是作者实验使用的箱子,上面红圈圈出来的是磁铁吸附在盒子一侧,用来提供特征。可以看到在盒子侧壁上有更小的点,但是这些点在声纳的成像图中没有显示。图(b)左图是一张声纳的成像图及其相应的标签,右图则是提取出来的特征。
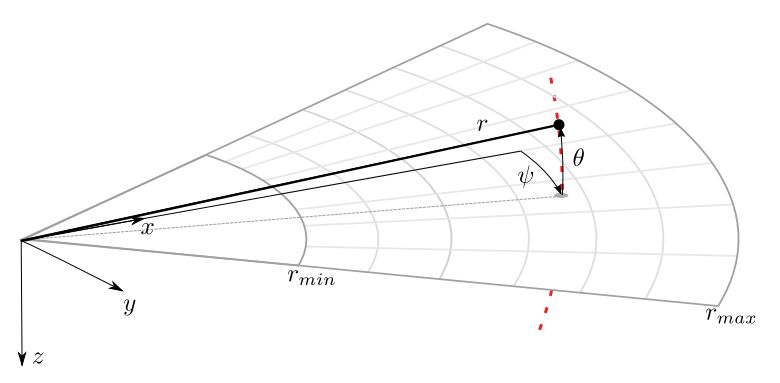
图2 上图是成像声纳几何。灰色网格表示笛卡尔图像投影在xy平面,任何沿着红色圆弧上的点被声音反射后,会在图像上呈现不同的像素强度。像素在图片上的位置表明了测量的方位角及范围。
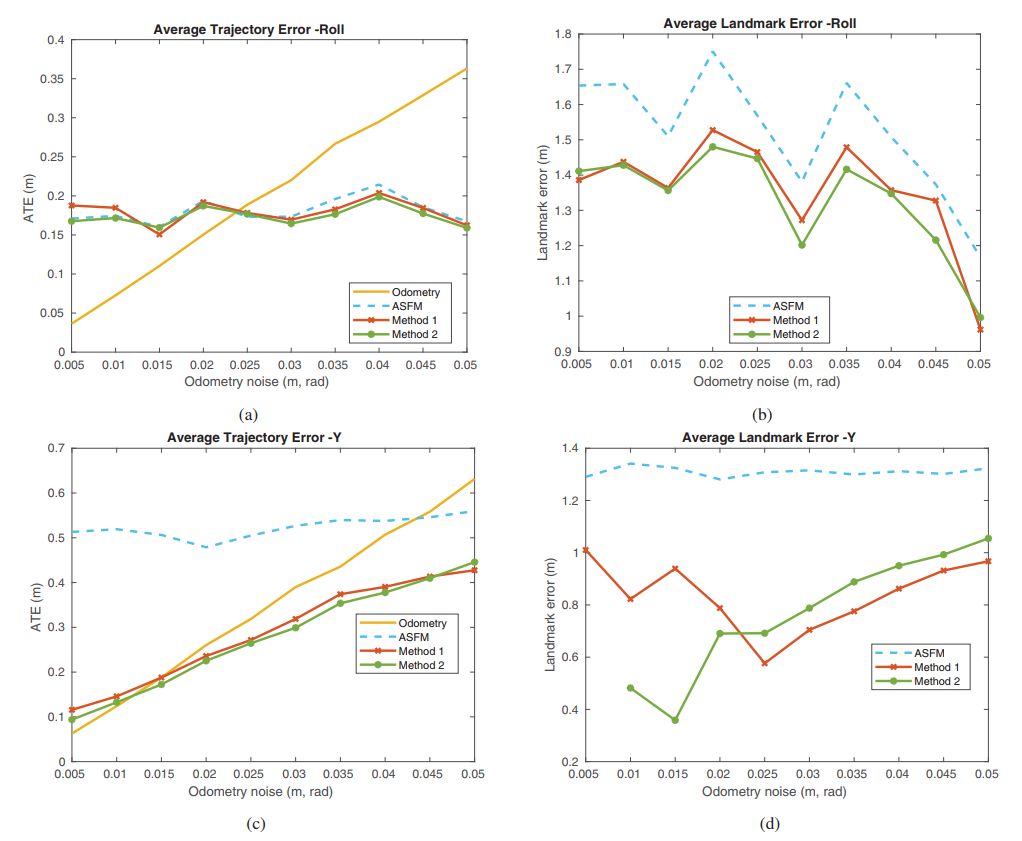
图3 上图是作者的实验结果,其中蓝色虚线代表作者的方法。

Abstract
Recent algorithms have demonstrated the feasibility of underwater feature-based SLAM using imaging sonar. But previous methods have either relied on manual feature extraction and correspondence or used prior knowledge of the scene, such as the planar scene assumption. Our proposed system provides a general-purpose method for feature-point extraction and correspondence in arbitrary scenes. Additionally, we develop a method of identifying point landmarks that are likely to be well-constrained and reliably reconstructed. Finally, we demonstrate that while under-constrained landmarks cannot be accurately reconstructed themselves, they can still be used to constrain and correct the sensor motion. These advances represent a large step towards general-purpose, feature-based SLAM with imaging sonar.
如果你对本文感兴趣,请点击点击阅读原文下载完整文章,如想查看更多文章请关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
百度网盘提取码:99km
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





