【泡泡一分钟】在低成本的机器人上实现基于云协作的3D建图
每天一分钟,带你读遍机器人顶级会议文章
标题:Cloud-based Collaborative 3D Mapping in Real-Time with Low-Cost Robots
作者:Gajamohan Mohanarajah, Vladyslav Usenko, Mayank Singh, Raffaello D’Andrea, and Markus Waibel
来源:IEEE Transactions on Automation Science and Engineering 2015
编译:王慧国
播音员:火箭姚小麦
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

今天介绍的文章是“Cloud-based Collaborative 3D Mapping in Real-Time with Low-Cost Robots”——在低成本的机器人上实现基于云协作的3D建图,该文章发表在Transactions on Automation Science and Engineering 2015。
对于多个低成本机器人基于云协作下的3D建图,这篇文章展示了相应的体系结构,协议和并行算法。
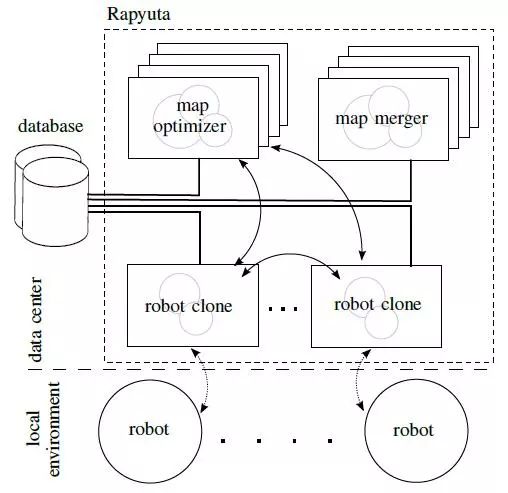
图为框架结构图,主要包括云端数据处理中心和各个机器人操作实体
每个机器人都在一个类手机处理器上运行一个稠密视觉里程计算法。视觉里程计所产生的关键帧被发送到云中,进而进行并行优化和根据其他机器人产生的地图进行融合。优化之后,云再将相应更新的位姿发送给各个机器人。
所有流程都由Rapyuta管理,Rapyuta是一个在商业数据中心运行的云机器人框架。本文包括协同建图的定性可视化,以及定位精度,带宽使用,处理速度和地图存储的定量评估。
更多关于Rapyuta的信息,可访问:https://github.com/rapyuta/rce
PS:另外在文中,我们有看到其视觉里程计部分是使用直接法,那么自然的,在回环检测的时候还是用到了SURF特征的词袋(有待讨论);再者关于多机器人共视问题,在文中可以理解为各机器人所建地图之间的重叠问题,它使用地图中的随机关键帧来作为对比,这种方法是否高效直接,希望大家交流。在此仅提供一些可商讨的点,以期有益于大家。
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。点击http://rapyuta.org/_media/mohtase14-2.pdf,即可获取英文下载。

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




