【泡泡一分钟】听觉SLAM
每天一分钟,带你读遍机器人顶级会议文章
标题:Acoustic SLAM
作者:Christine Evers and Patrick A. Naylor
来源:IEEE TRANSACTIONS ON AUDIO, SPEECH, AND LANGUAGE PROCESSING
播音员:四姑娘
编译:尹双双
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是——听觉SLAM,该文章是由IEEE高级会员发表在2018年最新音频,语音和语言处理的SCI期刊。
声学测图可跨时间和空间地获取声源的三维位置信息。但实际上,声源的位置信息是仅通过估计声源的到达方向(Direction-of-Arrival,DoA)来提供的,而声源传感器的接收范围通常很难获知。DoA估计也受到混响,噪音和信号干扰,会导致位置估计错误,并由此引起后续DoA估计错误。另外,很多声源,比如说话的人,产生的声音不是持续活跃的,而在不活跃时间段内会丢失DoA估计值。DoA估计值是相对于观察者的传感器位置和方向而言,所以准确的观察者位置是至关重要的。
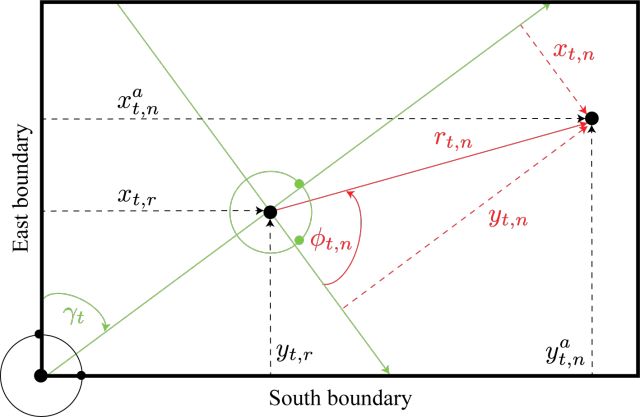
图1 绝对(黑色)和观察者相对(绿色)坐标。
在本文中,作者提出基于听觉的同步定位与地图构建(aSLAM)方法,通过声信号来同步构建多个声源位置的3D图,同时实现在场景图内确定观测者的位置,并用一系列真实的模拟来分析和评估了aSLAM的性能,结果给出了运动的影响和声源定位的准确性。
主要贡献
本文提出的aSLAM方法避免了需要永久性声源作为地标,基于随机有限集合(RFS)的理论来映射多个间歇性信号源,以适应错误和丢失的DoA估计。另外不用主动发射声音脉冲,而是利用来自2D DoA估计被动地推断出声源的3D笛卡尔位置,通过利用观测者的时空变化来构建概率源三角测量。分别在控制的和实际的室内实验中对aSLAM理论和实践进行了分析,结果表明,aSLAM对DoA估计中存在的混响干扰以及观察者运动的不确定性具有很强的鲁棒性。
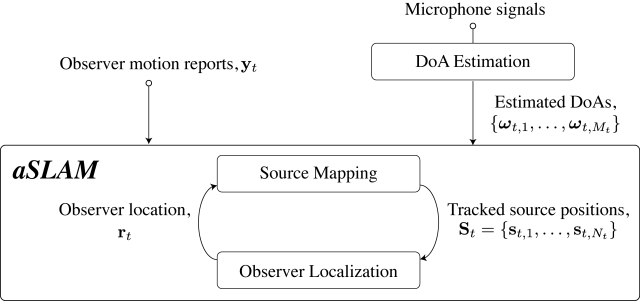
图2 本文方法的数据处理链
算法流程
输入DoA估计值,通过鲁棒的概率假设密度(PHD)滤波器处理混响导致的DoA虚假估计,再利用概率三角测量,跨时空地确定声源位置。 然后将运动报告与从声源位置图推断出的观察者信息融合,使用边缘化的粒子滤波器概率地定位出观察者位置。
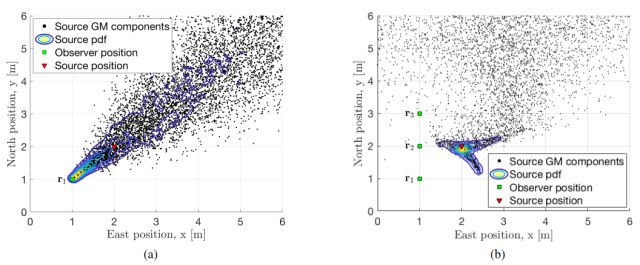
图3 概率三角测量示例,表明高斯混合GM成分的分布 a)初始阶段, b)最终观察者位置。
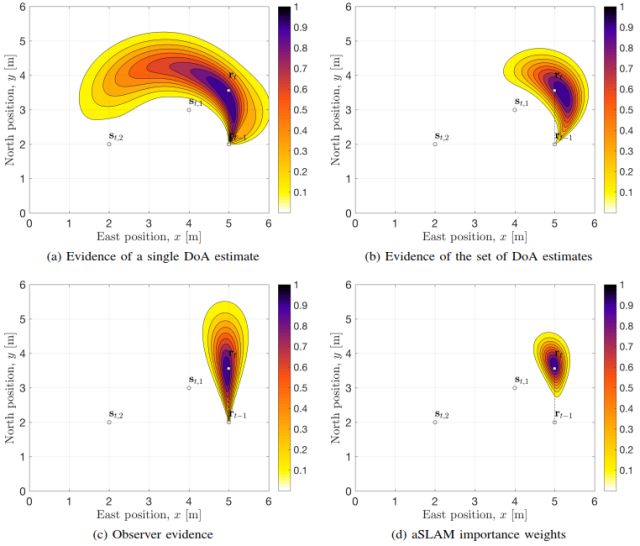
图4 概率地定位观察者:确定观察者可能的位置区域依据:(a)单个DoA估计,(b)DoA估计集合,(c)观察者的运动报告以及(d)aSLAM重要性权重,相当于(b)和(c)的交集。 轮廓颜色表示pdf的相应归一化值。
主要结果
结果表明,通过利用观测者在时间和空间上的变化,aSLAM可以精确地重构观测者路径并同时推断2D DoA估计的3D声源位置。 对于观测者以人类行走速度移动,估计距离为1 - 4米的源传感器的精度可以达到0.14米。 此外,结果表明aSLAM对DoA估计错误以及非连续源的混响干扰和不活越引起的虚假或遗漏的DoA估计是稳健的。 观测者的定位精度随着声源数量的增加而进一步提高。
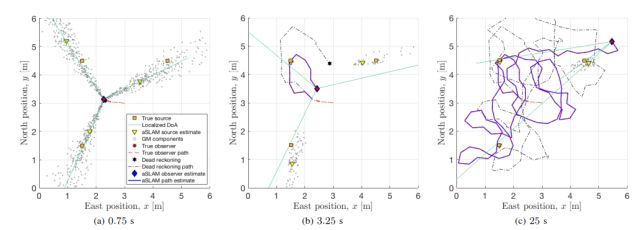
图5 实验1:在σw,vt=0.75s,3.25s和25s处的aSLAM估计值的变化,vt = 1.5m / s。
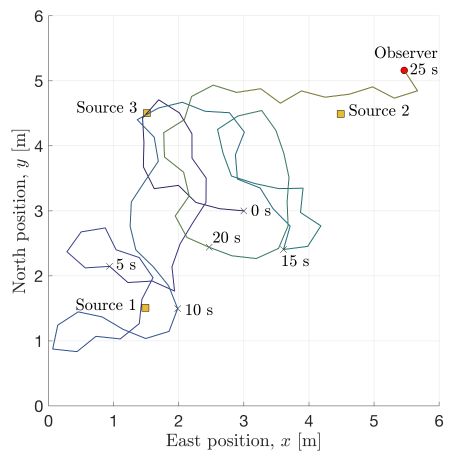
图6 实验4:Birdseye的场景视图。 观察者的颜色路径表示进程时间。
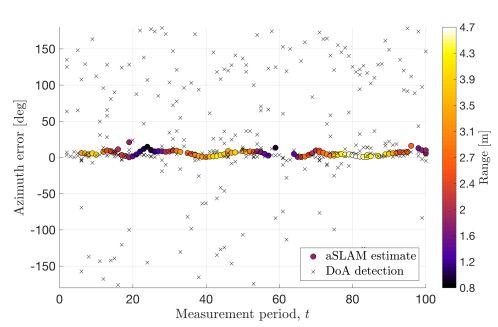
图7 房间模拟:相比于实际的DoA和aSLAM估计的方位角误差。 填充颜色:地面实际源传感器范围。

Abstract
An algorithm is presented that enables devices equipped with microphones, such as robots, to move within their environment in order to explore, adapt to and interact with sound source of interest. Acoustic scene mapping creates a 3D representation of the positional information of sound sources across time and space. In practice, positional source information is only provided by Direction-of-Arrival (DoA) estimates of the source directions;the source-sensor range is typically difficult to obtain.DoA estimates are also adversely affected by reverberation, noise,and interference, leading to errors in source location estimation and consequent false DoA estimates. Moroever, many acoustic sources, such as human talkers, are not continuously active, such that periods of inactivity lead to missing DoA estimates. Withal, the DoA estimates are specified relative to the observer’s sensor location and orientation.
Accurate positional information about the observer therefore is crucial. This paper proposes Acoustic Simultaneous Localization and Mapping (aSLAM), which uses acoustic signals to simultaneously map the 3D positions of multiple sound sources whilst passively localizing the observer within the scene map. The performance of aSLAM is analyzed and evaluated using a series of realistic simulations. Results are presented to show the impact of the observer motion and sound source localization accuracy.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




