【泡泡一分钟】基于空间划分的紧凑型闭环检测方法
每天一分钟,带你读遍机器人顶级会议文章
标题:A Compact Loop Closure Detection Based on Spatial Partitioning
作者:Jianbin Chen, Jun Li, Yang Xu, Guangtian Shen, Yangjian Gao
来源:2017 2nd International Conference on Image, Vision and Computing
播音员:王肃
编译:杨小育
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是——基于空间划分的紧凑闭环检测方法,该文章发表于ICIVC2017。
在SLAM系统中,回环检测是一个当前位置与历史位置进行匹配的过程。词袋法(BoW)是回环检测常用的方法,但是存在因向量量化而造成的感知混叠问题。本文提出了一种改进的BoW空间分割方法(SPBoW)。首先,我们应用场景分割将视觉特征的空间信息整合到BoW中;然后,为了获得更好的容错性,设置 一个分层K均值关联字典来关联所有的视觉单词。最后,使用滑动优化来消除视角变化的影响。实验结果表明,与传统的BoW算法相比,该方法的实时性和召回率更好。
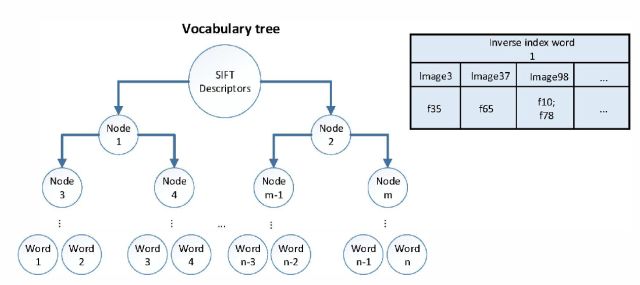
图1 分层K-means关联词典构建过程。
首先获得所有训练图像的SIFT描述子作为字典的根节点。然后进行K均值分类(k等于2)。在记录k个聚类中心之后,k个子节点被用作K均值分类的根节点。最后,叶节点的每个中心都用作字典单词。停止节点的K均值分类条件是节点中的特征量小于或等于特定的容量阈值(阈值是50)。
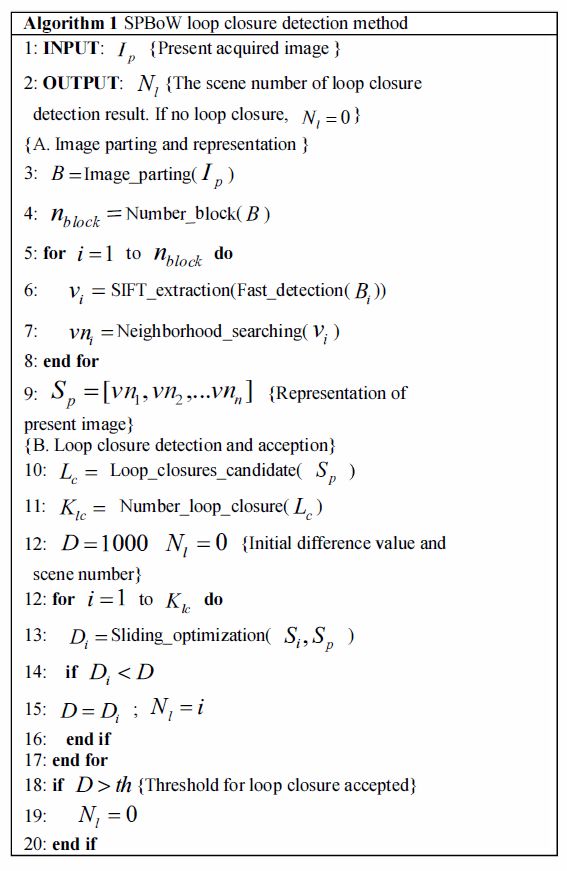
图2 本文方法的伪代码
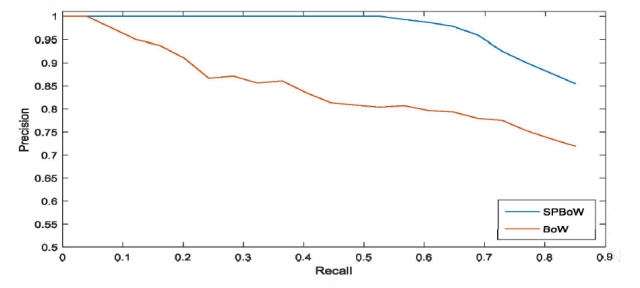
图3 在使用City Center数据集的召回率
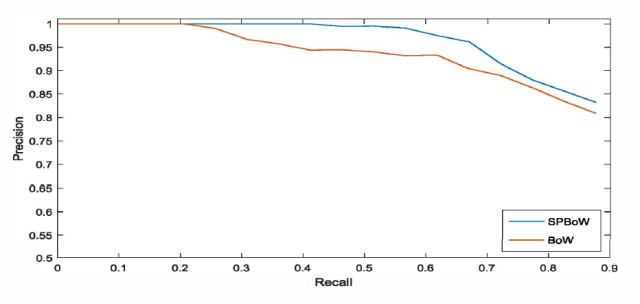
图4 使用New College数据集测试的召回率

Abstract
Loop closure detection (LCD) is a process trying to find a match between the current and a previously visited locations in SLAM. The bag of words (BoW) is a popular approach used in LCD, however, limited by perceptual aliasing primarily due to vector quantization. This paper proposes an improved method of the BoW called spatial partitioning BoW(SPBoW). We first apply scene segmentation to integrate the spatial information of visual features into BoW. Then, for better error tolerance, we setup a hierarchical K-means association dictionary to relate all visual words. Finally, sliding optimization is used to eliminate the effect of changing perspectives. The experiment results demonstrate much better real-time reaction and recall performance compared with the conventional BoW algorithm
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



