【泡泡一分钟】 S3FD:单次尺度不变的面部检测器(ICCV2017-21)
每天一分钟,带你读遍机器人顶级会议文章
标题:S3FD: Single Shot Scale-invariant Face Detector
作者:Shifeng Zhang,Xiangyu Zhu,Zhen Lei,Hailin Shi,Xiaobo Wang,Stan Z. Li
来源:ICCV 2017 ( IEEE International Conference on Computer Vision )
播音员:水蘸墨
编译:王少博
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

本文提出了一个实时的面部检测器,名为S3FD,它可以在不同尺度下使用单个深层神经网络检测人脸图像,效果都是极好的,尤其是对小面积的面部识别。本文致力于解决基于锚的检测器所面临的通病——当检测目标变得更小时会发生严重的退化。我们在以下三个方面做出了贡献:
1)提出了尺度自适应的面部检测框架可以很好的来处理不同尺度下的面部识别。我们将锚平铺在更宽的层面以此来保证各尺度下的面部有足够的特征用于检测。除此之外,我们根据有效的接受度来设计锚的尺度场并提出了一个等比例区间原则。2)通过尺度补偿锚匹配策略提高小面孔召回率。3)通过最大化背景标签的方法来减少小面部的假证比率。
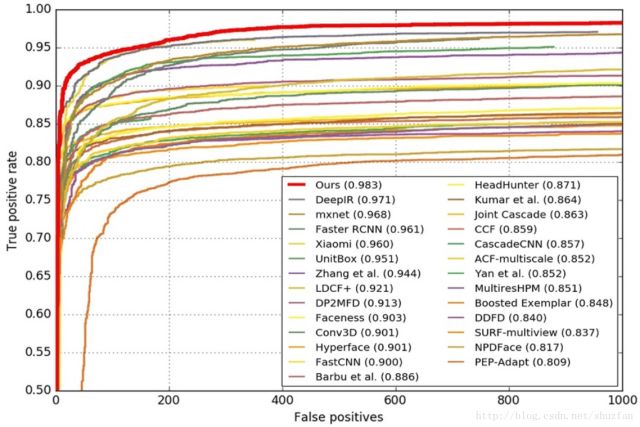
实验结果显示,与其他面部识别算法相比,我们的算法表现得更好,包括在AFW PASCA FDDB、WIDER FACE这些数据集上,运行速度参考:36FPS with Titan X & VGA。
可以将本文看作是对以往算法:
SSD: Single Shot MultiBox Detector的修改,其基本框架继续沿用之前的SSD,但是在不同层使用不同尺度的anchor预测目标。
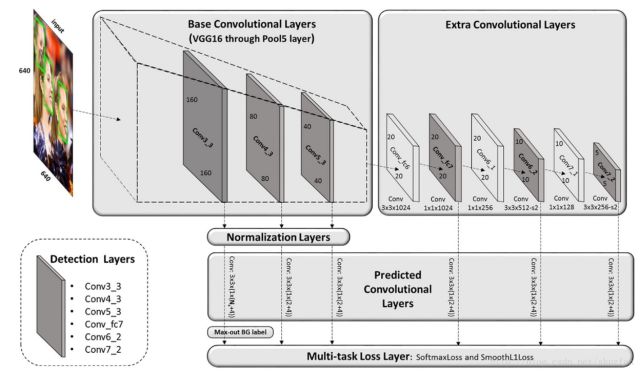
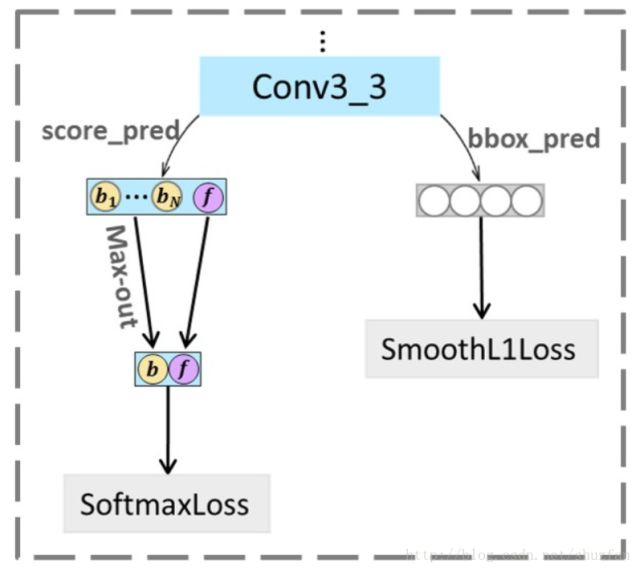
为了减少小目标所产生的false positive,文中采用了下面的方法来加强对小目标的区分:
FDDB上的测试结果:
Abstract:
This paper presents a real-time face detector, named Single Shot Scale-invariant Face Detector (S3FD), which performs superiorly on various scales of faces with a single deep neural network, especially for small faces. Specifically, we try to solve the common problem that anchorbased detectors deteriorate dramatically as the objects become smaller. We make contributions in the following three aspects: 1) proposing a scale-equitable face detection framework to handle different scales of faces well. We tile anchors on a wide range of layers to ensure that all scales of faces have enough features for detection. Besides, we design anchor scales based on the effective receptive field and a proposed equal proportion interval principle; 2) improving the recall rate of small faces by a scale compensation anchor matching strategy; 3) reducing the false positive rate of small faces via a max-out background label. As a consequence, our method achieves state-of-theart detection performance on all the common face detection benchmarks, including the AFW, PASCAL face, FDDB and WIDER FACE datasets, and can run at 36 FPS on a Nvidia Titan X (Pascal) for VGA-resolution images.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
链接: https://pan.baidu.com/s/1jp0bo99gT5QqhzZh939rpg
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com


