【泡泡一分钟】学习紧密的几何特征(ICCV2017-17)
每天一分钟,带你读遍机器人顶级会议文章
标题:Learning Compact Geometric Features
作者:Marc Khoury, Qian-Yi Zhou, Vladlen Koltun, UC Berkeley, Intel Labs, Intel Labs
来源:International Conference on Computer Vision (ICCV 2017)
播音员:郭晨
编译:王嫣然 周平
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

我们提出了一种学习特征的方法,这些特征代表了非结构化点云中某个点上的局部几何,同时在几何配准中具有重要意义,它支持机器人和3D视觉中的各种应用。当前最先进的非结构化点云局部特征是人工制作的,没有结合精度、精密性和鲁棒性等理想特征。我们指出,通过优化将高维直方图映射到低维欧几里得空间的深层网络,可以比现有的描述更紧密、精确。
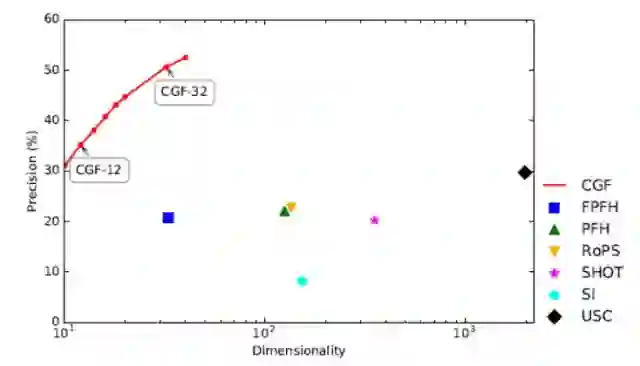
图1. 我们的方法产生了一系列紧密的几何特征(CGF),按维度进行了参数化。该图说明了SceneNN测试集中CGF的性能。我们的特征比基线更紧密、精确。水平轴(维度)表示对数坐标。
我们展示了所提出的方法产生的描述符比现有技术的手工特征更具辨别性和更紧凑。 图1提供了一个插图。实验表明,在较低的查询时间内,我们的紧凑几何特征(CGF)能产生更精确的匹配。 当CGF用于几何注册的标准Redwood基准测试时,无需对该数据集进行任何培训或微调,就可以达到迄今为止在基准测试中报告的最高召回率。

Abstract
We present an approach to learning features that represent the local geometry around a point in an unstructured point cloud. Such features play a central role in geometric registration, which supports diverse applications in robotics and 3D vision. Current state-of-the-art local features for unstructured point clouds have been manually crafted and none combines the desirable properties of precision, compactness, and robustness. We show that features with these properties can be learned from data, by optimizing deep networks that map high-dimensional histograms into low-dimensional Euclidean spaces. The presented approach yields a family of features, parameterized by dimension, that are both more compact and more accurate than existing descriptors.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
百度网盘链接:https://pan.baidu.com/s/1bpXzNRL 密码: svpg
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



