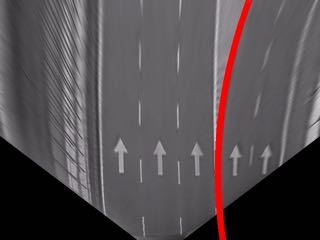
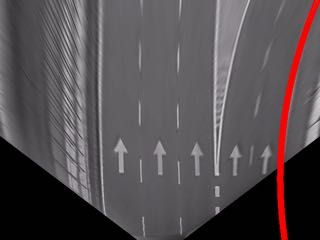
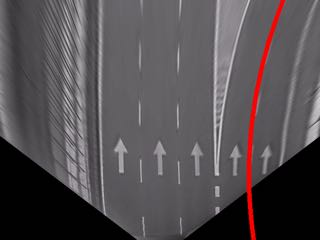
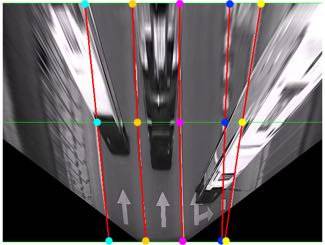
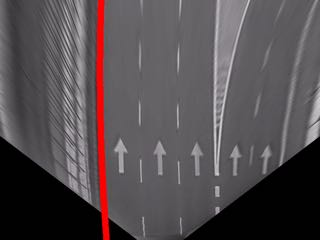
Lane detection is to detect lanes on the road and provide the accurate location and shape of each lane. It severs as one of the key techniques to enable modern assisted and autonomous driving systems. However, several unique properties of lanes challenge the detection methods. The lack of distinctive features makes lane detection algorithms tend to be confused by other objects with similar local appearance. Moreover, the inconsistent number of lanes on a road as well as diverse lane line patterns, e.g. solid, broken, single, double, merging, and splitting lines further hamper the performance. In this paper, we propose a deep neural network based method, named LaneNet, to break down the lane detection into two stages: lane edge proposal and lane line localization. Stage one uses a lane edge proposal network for pixel-wise lane edge classification, and the lane line localization network in stage two then detects lane lines based on lane edge proposals. Please note that the goal of our LaneNet is built to detect lane line only, which introduces more difficulties on suppressing the false detections on the similar lane marks on the road like arrows and characters. Despite all the difficulties, our lane detection is shown to be robust to both highway and urban road scenarios method without relying on any assumptions on the lane number or the lane line patterns. The high running speed and low computational cost endow our LaneNet the capability of being deployed on vehicle-based systems. Experiments validate that our LaneNet consistently delivers outstanding performances on real world traffic scenarios.
翻译:测道是探测公路上的航道,提供每一航道的准确位置和形状。它作为关键技术之一,使现代协助和自主的驾驶系统能够实现现代化和自主的驾驶系统。但是,各航道的若干独特特性对探测方法提出了挑战。由于缺乏独特的特征,车道探测算法往往被与当地相类似的其他物体混淆。此外,公路上各行道的不连贯数量以及不同的航道模式,例如固体、破碎、单条、双条、合并和分道线,进一步阻碍了行道的运行。在本文中,我们建议采用深层神经网络方法,即LaneNet,将航道探测分为两个阶段:车道边缘建议和车道线地方化。第一阶段使用车道边缘建议网网络进行像对车道边缘的分类,而第二阶段的车道地方化网络则被其他物体所混淆。 请注意,我们的行道网的目标只是用来探测基于行道系统的行道线线线,这给抑制在箭头和字符等公路上的类似行道标志上的假探测造成更多的困难。尽管目前存在着各种实际困难,但我们的行道路路路路路路路路路路路路路路路路路路路路路况的快速路路况的正确性标准也显示我们不可靠,而没有达到我们行路路路路路路路路路路路路路路路路路路路路路路路路路路的轨道的轨道的轨道的轨道的轨道的轨道的正确性标准路路路路路路路路路路路路路路路路路路路路路路的正确性率率率率率率率率率率率率率率率率率率率率率率率率率率率率率率率率率率率率,而不比。。。。。路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路路