深度学习技术在自动驾驶中的应用与挑战

分享嘉宾:江頔 智加科技 技术专家
文章整理:Hoh Xil
内容来源:DataFunTalk
出品平台:智加科技、DataFun
温馨提示:疫情期间,勤洗手,戴口罩。
导读:深度学习技术经过近几年井喷式的发展,在很多领域都得到了广泛的应用。在自动驾驶系统中,深度学习技术也起到了至关重要的作用,同时也面临着非常多的挑战。我们一直在探索,在一个安全、稳定的自动驾驶产品中,深度学习技术应该有着怎样的作用边界,又如何能最好地发挥其优势。本次分享的主题为深度学习技术在自动驾驶中的应用与挑战,主要包括:
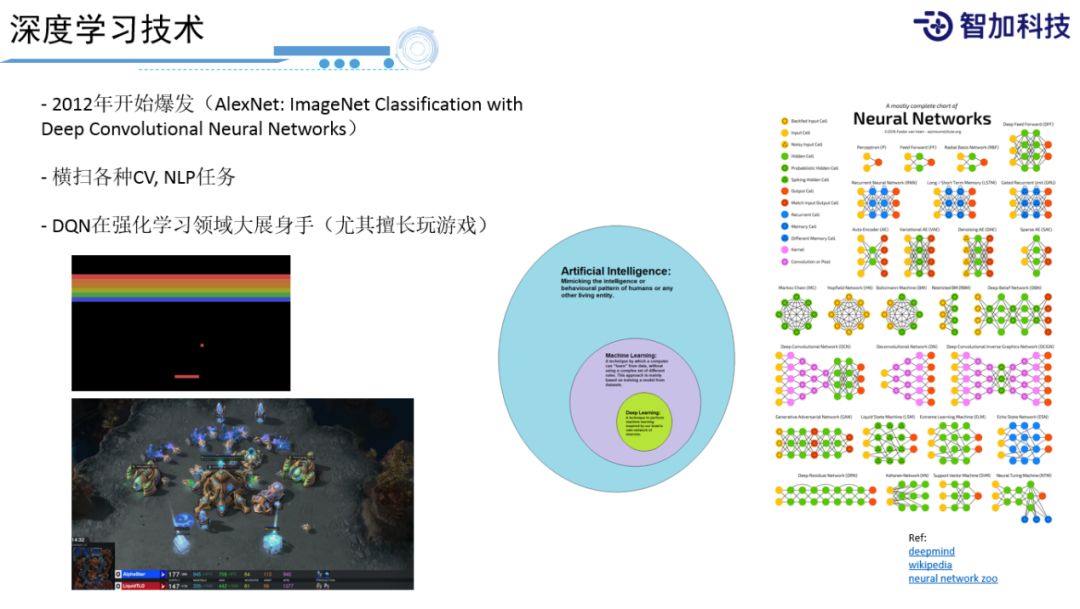
深度学习技术
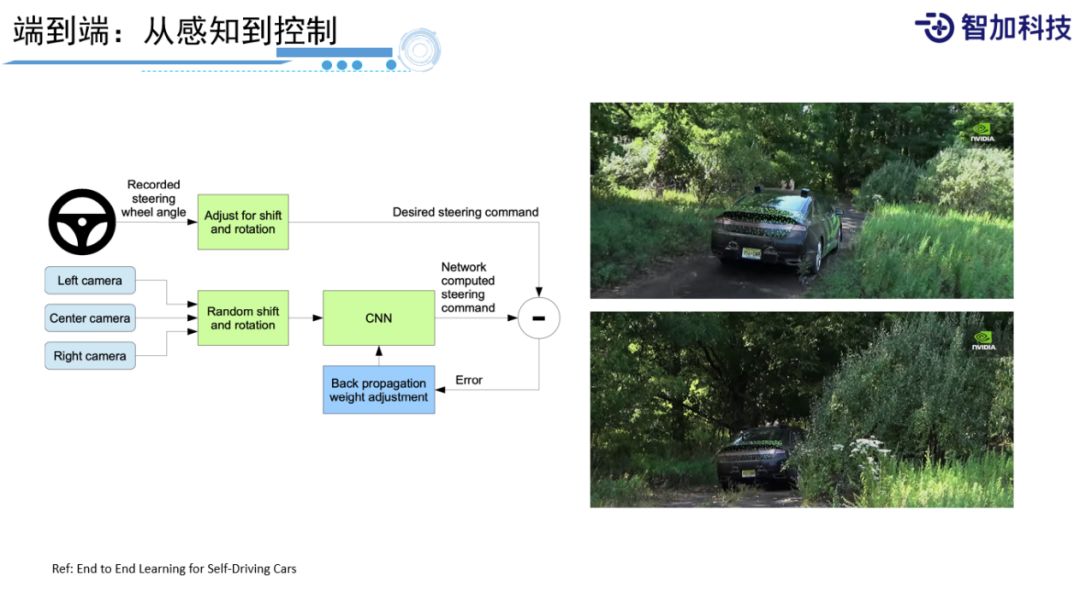
端到端:从感知到控制
深度学习的特点
应用策略
-
自主挖掘数据中存在的特征和模式,大幅降低人工特征工程的需求 -
对于定义清晰的问题,有较强的可扩展性(加数据或数据增强)
-
可解释性差,可能会“放飞自我”,不太可控 -
算力要求较高
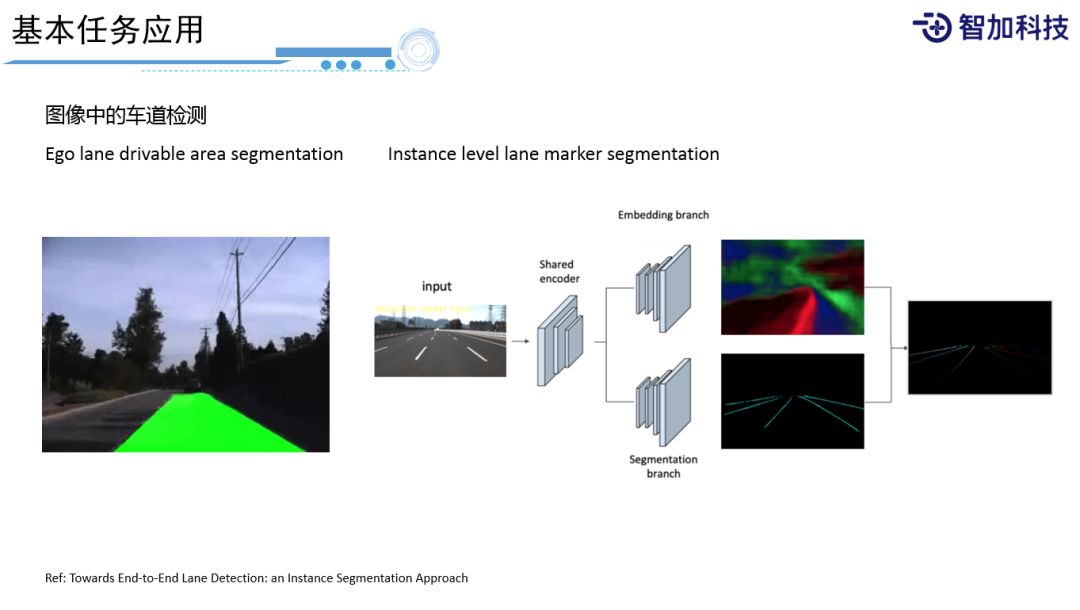
基本任务,是指只需要回答“是什么”或者“在哪”的任务。定义清晰,是指有明确的目标或者监督信息,在强化学习语境中,就是有明确的reward function。如CV中的目标检测、图像分割等。下面分享下应用实例:
Demo
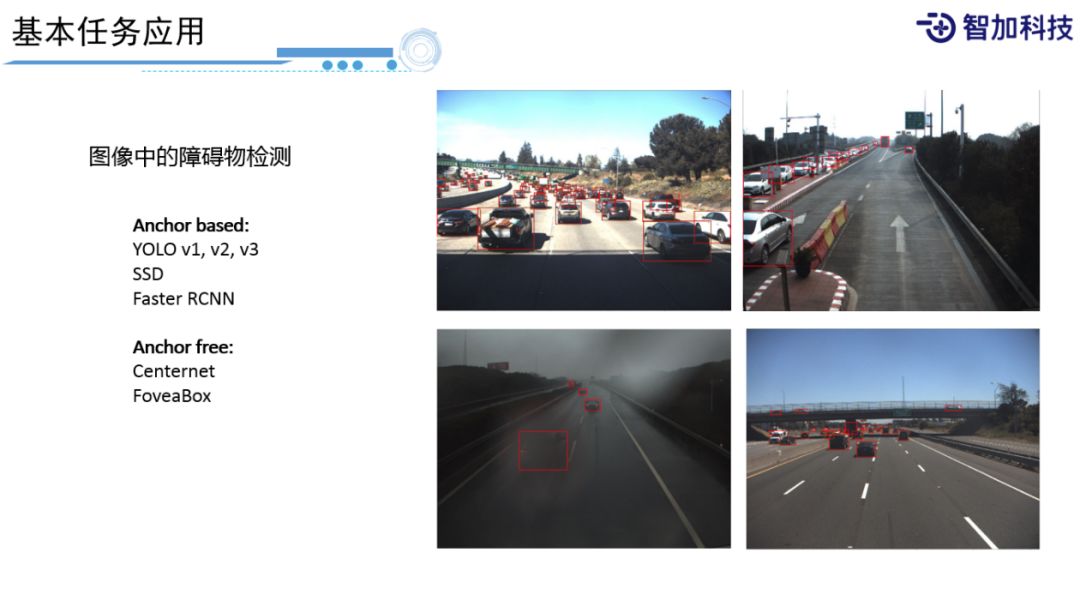
上图是一些比较有挑战的场景:拥挤的路况、远处的障碍物、雨天、穿过高架桥等。障碍物检测比较成熟,这里不再细讲,常用的算法有:
-
Anchor based:YOLO v1,v2,v3/SSD/Faster RCNN -
Anchor free:Centernet/FoveaBox

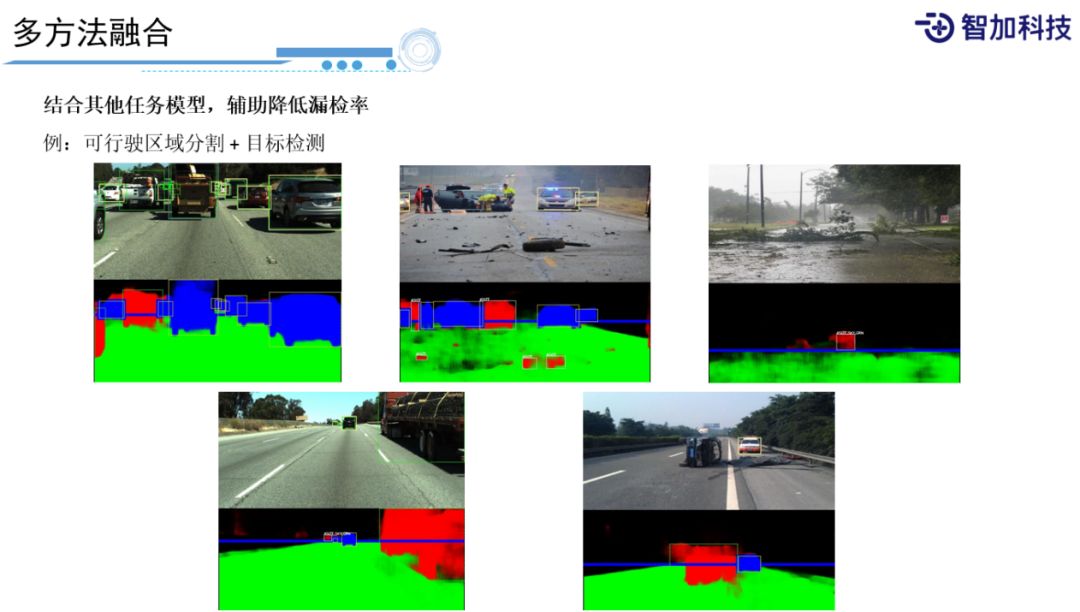
在实际应用中,目标检测模型难免会产生误检和漏检,如左图中的皮卡和卡车很明显就被漏掉了。另外,对于训练集少见或没见过的特殊场景,深度神经网络往往无能为力,一旦出现这种情况,往往非常危险。对应的,我们的思路是:
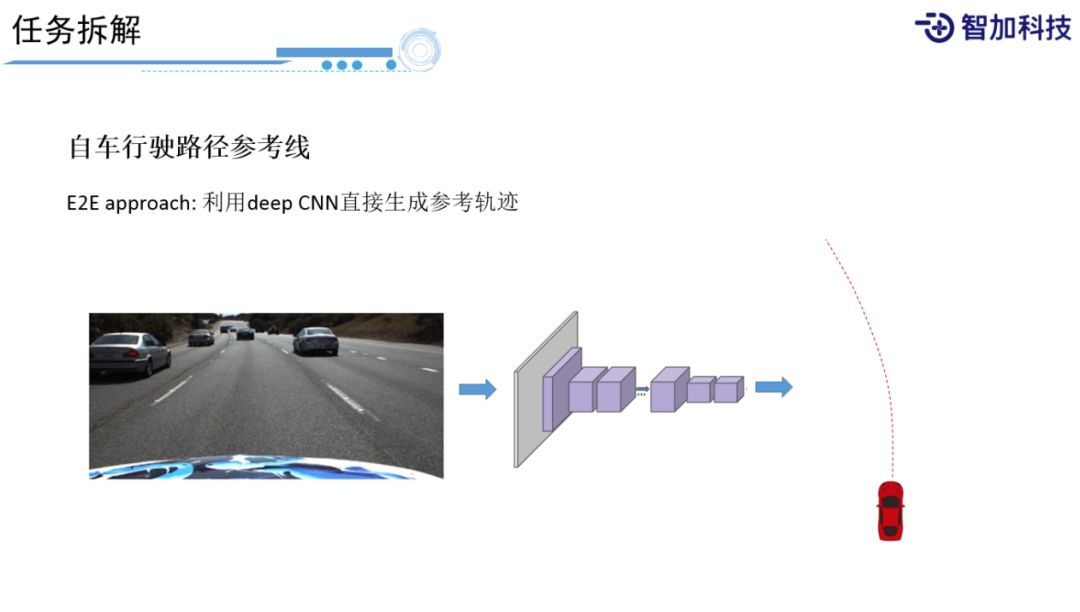
我们在做Planning时,我们需要做一个自己车本身轨迹的参考线,以其为参考生成最终的轨迹,并且做一些速度的规划。如果我们没有高精地图,我们可能会采用E2E approach的方法,感知到一张图片之后利用deep CNN直接生成参考轨迹(如上图最右侧),这样单独的参考线通常是不能用的。所以我们需要把任务进行拆解。
-
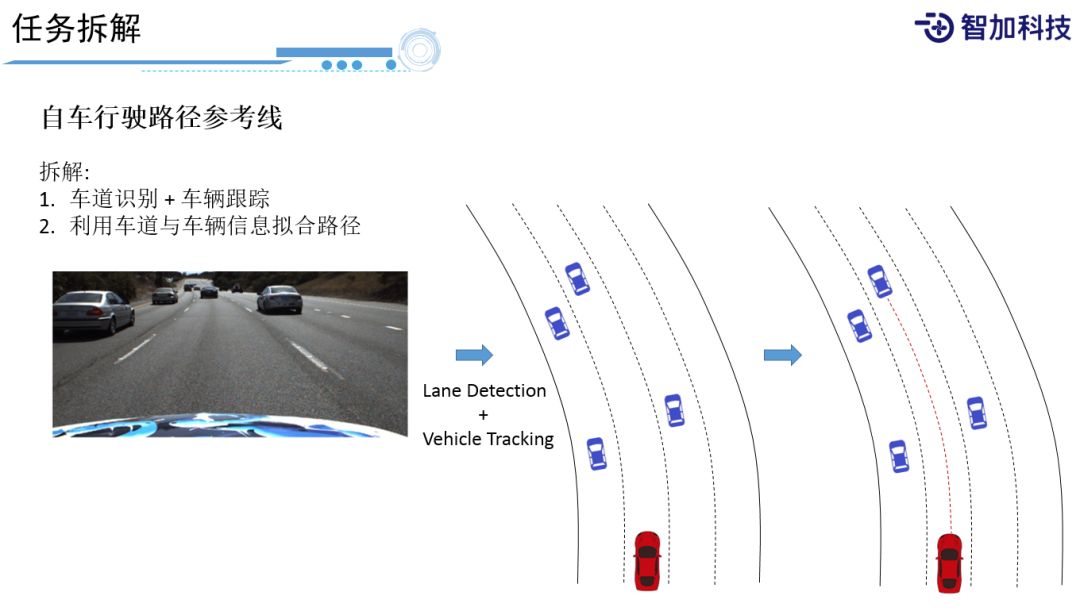
车道识别+车辆跟踪:先识别车道再识别车 -
利用车道与车辆信息拟合路径:把车道和车放入场景中,再利用车的朝向、轨迹、速度分布以及车道线的几何形状拟合出最终的路径参考线。
-
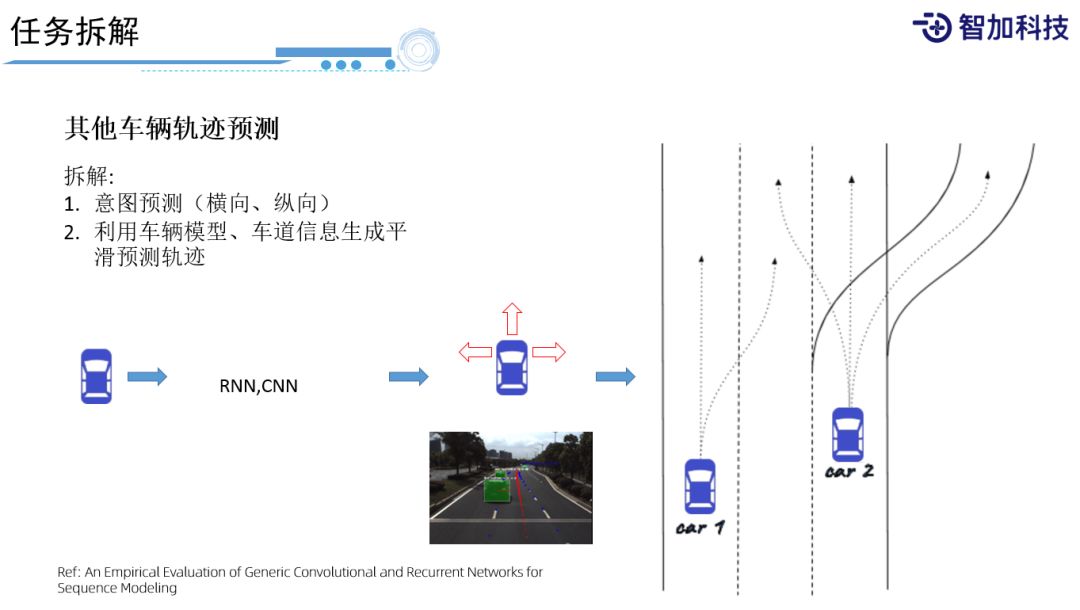
意图预测(横向、纵向),利用RNN、CNN先做一些意图预测(左转、右转或者直行),纵向就是匀速、加速或者减速,做这种简单的意图分类,将这个问题的维度缩小。 -
然后,利用车辆(如动力学)模型、车道信息生成平滑预测轨迹。

友情推荐:
智加科技多岗位热招中,关注“智加科技AI”,即刻投递简历:

——END——
文章推荐:

登录查看更多
相关内容

Arxiv
3+阅读 · 2019年3月20日




相关VIP内容
相关资讯
相关论文
Arxiv
3+阅读 · 2019年3月20日