
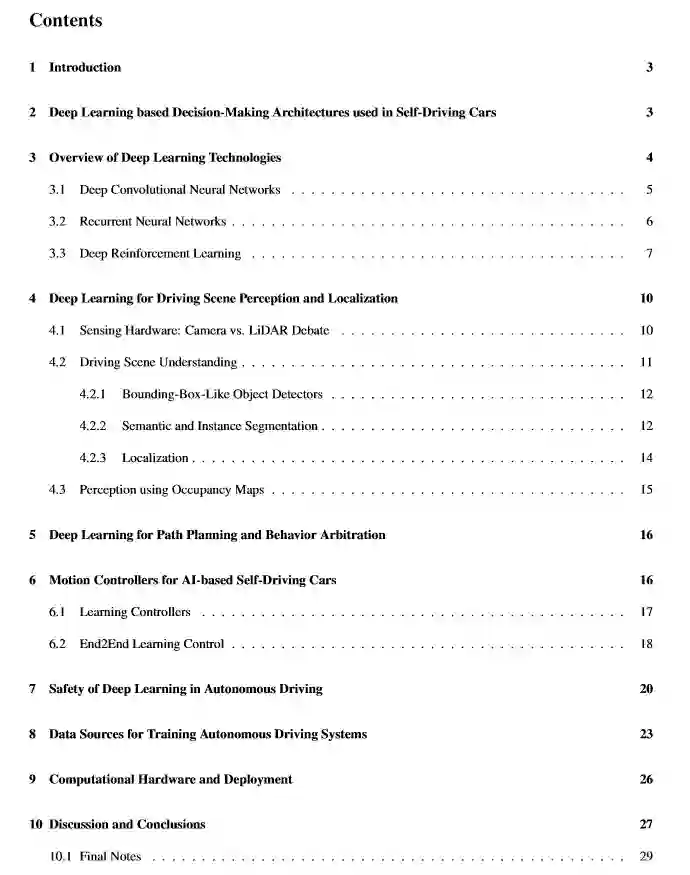
题目: A survey of deep learning techniques for autonomous driving
简介: 本文目的是研究自动驾驶中深度学习技术的最新技术。首先介绍基于AI的自动驾驶架构、CNN和RNN、以及DRL范例。这些方法为驾驶场景感知、路径规划、行为决策和运动控制算法奠定基础。该文研究深度学习方法构建的模块化“感知-规划-执行”流水线以及将传感信息直接映射到转向命令的端到端系统。此外,设计自动驾驶AI架构遇到的当前挑战,如安全性、训练数据源和计算硬件等也进行了讨论。该工作有助于深入了解深度学习和自动驾驶AI方法的优越性和局限性,并协助系统的设计选择。
成为VIP会员查看完整内容
相关内容


相关VIP内容
相关资讯
相关论文