在海洋环境中,自动识别系统(AIS)包含与船舶轨迹相关的信息,可用于检测不寻常的海洋事件和海洋轨迹模式。为了用监督学习方法检测这些事件,必须对AIS信息进行人工注释,这可能是一个苛刻的过程。因此,无监督的方法被用来识别基于船只轨迹的异常轨迹模式。通常情况下,对海上活动的密集区域进行研究,以捕捉常见的轨迹模式,这有助于识别不遵循常规的轨迹。然而,这些方法不能检测出共同路径上的异常行为,也不能将与时间有关的事件纳入分析中。这种挑战促使本工作采取的方法是使用自动回归技术对船舶轨迹进行建模,并通过聚类分析来探索船舶的行为模式。结果表明,自动回归综合移动平均数(ARIMA)和奥恩斯坦-乌伦贝克(OU)过程能够对轨迹进行建模,并可与基于密度的空间聚类应用(DBSCAN)、层次聚类(HC)和光谱聚类(SC)一起使用,以识别不同的行为模式。
在海洋环境中,导航系统被用来确保船只在海上航行时的安全和保障。自动识别系统(AIS)的发展和实施在分析船舶轨迹和检测不寻常的海上事件方面发挥了重要作用,如可疑活动、危险事件和海上追踪模式(Peiguo等人,2017;Li等人,2018)。这些系统提供与船舶运动和状态有关的重要信息,如地理位置和运动学。这些信息由船只通过AIS信息发送,通常由卫星、岸基站和周围船只的收发器检测。
虽然信息丰富,但AIS信息通常缺乏标签或元数据,而这些是应用监督机器学习方法所需要的(Peiguo等人,2017;Li等人,2018)。大多数数据的标注是手工进行的,这可能是一个苛刻的过程。此外,目前文献中使用的标注数据通常是私有的(Nguyen, Vadaine, et al., GeoTrackNet-A Maritime Anomaly Detector Using Probabilistic Neural Network Representation of AIS Tracks and A Contrario Detection 2021),或者是合成的(Riveiro, Falkman and Ziemke, Visual analytics for the detection of anomal Maritime behavior 2008),使得复制已发表的结果很困难。因此,无监督学习技术经常被应用于AIS数据,以分析船舶行为和识别异常事件(d'Aisio, et al. 2018a; Forti, et al. 2019; Mazzarella et al.)
在这种情况下,聚类技术已被广泛用于AIS数据,其中静态特征通常用于通过识别海上活动的密集区域来识别共同的船只路径(Liu等人,2014)。然而,这种方法不能检测出共同路径上的模式或异常行为或与时间有关的事件,因为它没有包括时间成分。这种挑战促使我们提出了一种方法,其中包括使用自动回归技术,如自动回归综合移动平均线(ARIMA)和奥恩斯坦-乌伦贝克(OU)过程,然后应用聚类算法。这种方法已经被用于不同的研究领域,以减少处理时间和内存使用,这在大数据场景中是相关的(Bagnall和Janacek 2004;Kalpakis、Gada和Puttagunta 2001;Hendrawati等人2021;Magdalene和Zoraida 2022)。然而,据我们所知,这种方法还没有被用于AIS数据来分析船只的轨迹。
文献中常用ARIMA和OU来模拟船舶的轨迹,以预测下一个事件(d'Aisio, et al. 2018a, Forti, et al.) 这两种方法都包含了捕捉船只行为的时间依赖性。特别是,OU是为了模拟液体中的颗粒而开发的,与水中的船只有关联(Ross 2014)。因此,本研究的目标是检测船只的模式和异常行为,这些船只遵循常见和不常见的路径。在这种情况下,异常点被称为离群点,即在常见或不常见的路径中执行与其他路径不同的运动的轨迹。此外,异常点可以是在其他船只显示出更有规律的报告间隔的区域内,信息之间出现不规则的时间间隔的轨迹。
这项工作涉及对不同聚类方法的调查,使用开放源码数据来检测活跃的海洋地区的模式和异常船只行为(空间和时间)。选择使用开源数据使得这项工作可以重现,由于数据隐私规则,在发表的文献中并不总是如此。ARIMA和OU过程产生了描述轨迹动态的coecients,使用欧氏距离对其进行进一步聚类。本分析中使用的聚类技术包括基于密度的带噪声的空间聚类应用(DBSCAN)、分层聚类(HC)和谱聚类(SC)。该分析表明,使用自动回归技术与聚类算法的结合,有可能对船舶轨迹进行建模并检测行为模式。综上所述,这项工作的贡献包括:
-
应用一个框架,减少内存使用和处理时间,据我们所知,以前没有对AIS数据进行过调查。
-
对不同的聚类方法进行了广泛的调查,以比较ARIMA和OU模型所捕获的模式。
-
使用开放源码数据和提供源代码,使其具有可重复性。
-
显示这种方法可以捕获不同的跟踪模式、共同路径中的异常情况以及与报告信息相关的时间不规则。
本文的其余部分将包括相关工作、所采取的方法和途径、对所使用的算法技术的描述、所获得的结果和结论。
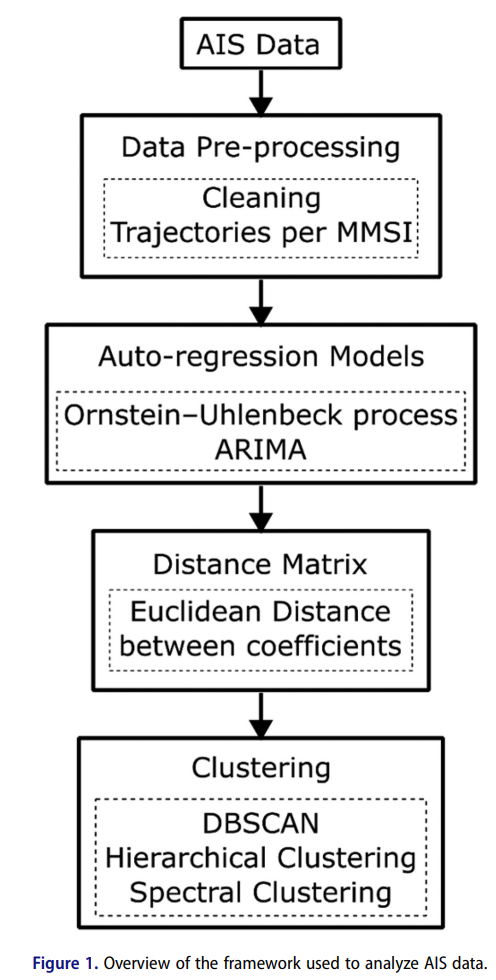
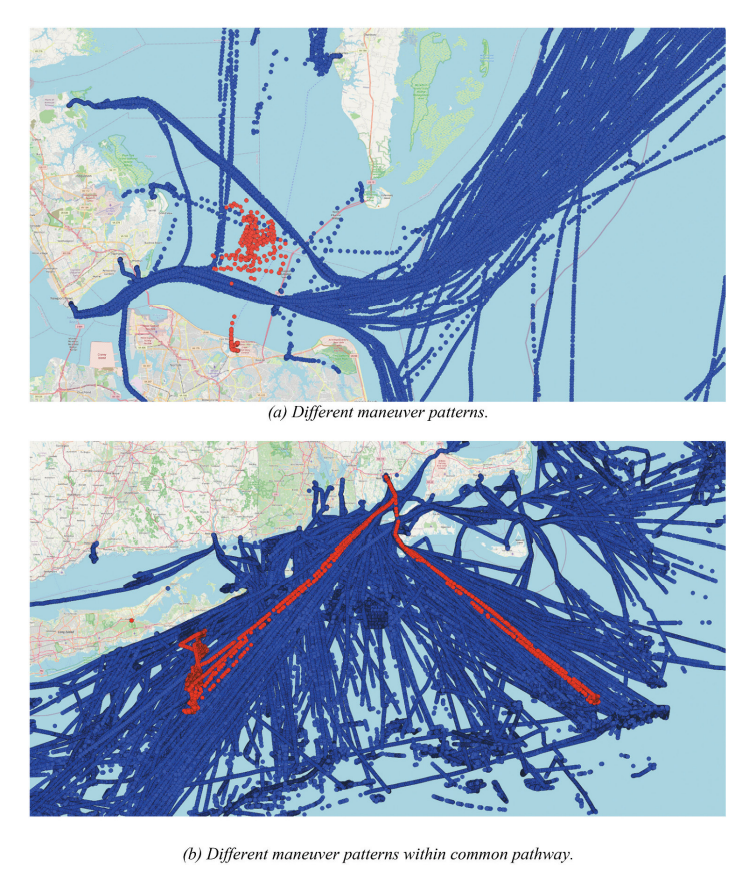
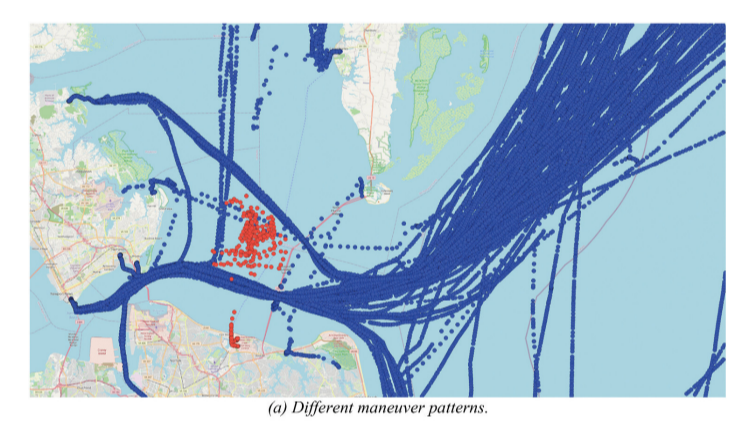
图 6. 这些图显示了 DBSCAN 使用 ARIMA 检测到的异常值,其中 (a) 异常值在同一位置执行多个操作,(b) 异常值在同一路径中呈现不同的操作模式。 (a) 不同的机动模式。 (b) 共同路径内的不同机动模式。