背景
目前,中小型机器人平台在典型的总线电压下运行,通常超过 30 VDC,这与基于 12/28-V 标称总线特性的现有商用和军用地面车辆平台的大型基础不兼容。这种选择主要是由于两个平台之间缺乏共同的要求,鉴于它们在应用上的认知差异,允许机器人平台朝着自己的个性化技术最佳实践选择不同的要求。这使得这两个系统缺乏以有意义的方式共享能量的能力,即使在机器人实际停靠在车辆平台上的情况下。虽然直流-直流电源转换是一个允许两个不同的平台相互连接的选择,但直流-直流转换的尺寸、重量和功率限制,使得更大的军用地面车辆平台上的静默观察和启动功能所需的高速持续电流无法实现。另外,目前用于中小型机器人平台的后勤系统中的电池是BB-2590电池,这是一种为通信应用设计的锂离子电池。这种电池的可用功率非常有限,需要由4到12个BB-2590组成的电池组来满足平台的电力和能源需求。在电池组中使用BB-2590还导致安装在车辆中的锂离子电池在年龄、循环寿命、剩余容量和电阻方面的巨大差异,从而降低了循环寿命并降低了性能。这些电池组不能被控制和限制在单个机器人车辆的整个生命周期内,因为它们是在车辆外部批量充电的,不能通过序列号追踪到它们来自的特定平台。此外,鉴于BB-2590不是专门为机器人应用设计的,它不一定是特定平台的最佳选择。6T锂离子电池为由BB2590组成的电池组提供了许多优势(在随后的章节中解释),因此将其添加到中小型机器人中提供了许多重大优势。鉴于这些优势,GVSC投资开发了用于中小型机器人的转换套件,从而可以使用6T锂离子电池,并且增加了许多新的应用、新的用例,以及最初没有改变设计的进步,如支持静音手表和自主的无充电器启动和维护应用。围绕这些好处的考虑,可以确定现有机器人平台和方法/程序中存在的一些缺点,以实现跳跃式机器人所实现的功能,包括:
-
目前,启动车辆需要士兵在车外执行这一功能。这在军事环境中存在潜在的安全隐患,而且目前还没有一种自主的方式来提供这种功能。
-
在海军舰艇上经常需要定期启动/跳跃式启动军用车辆,以便进行车辆卸载和定期维护。这是劳动密集型的,可以由自主或半自主的机器人来完成。
-
目前,由于两个平台的特征电压不同,机器人平台不能从大多数军用车辆的北约插座连接处充电。
-
目前,由于外形尺寸不同,储能装置不能在机器人和地面车辆之间互换。
-
尽管与地面车辆一起携带的机器人平台有可用的机载能源,但该能源目前不能用于延长车辆的静默值。
-
军用车辆上的对接机器人平台在运输过程中往往需要完全关闭以节省电力,需要在现场启动。
总结
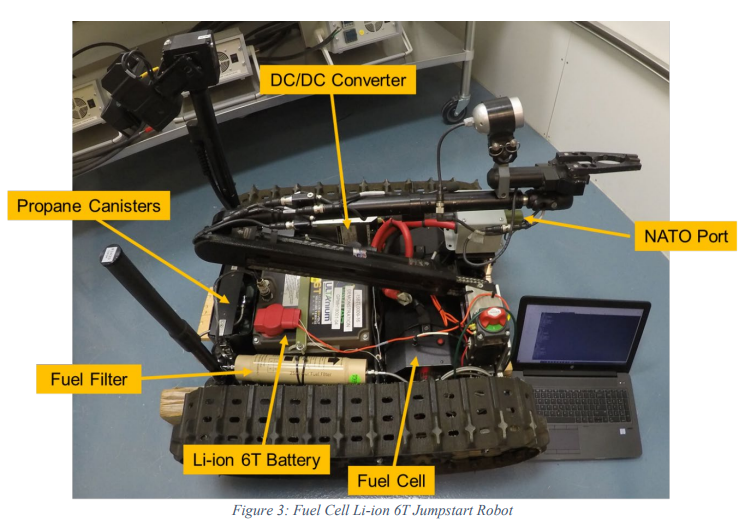
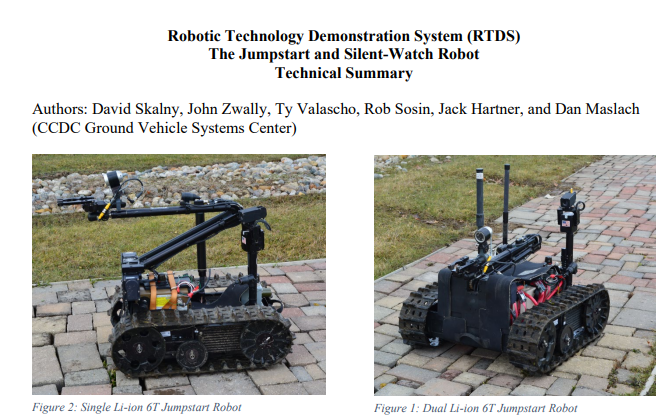
机器人技术示范系统(RTDS),以下仅指跳跃式机器人,是一种能够自主或半自主地通过NATO插座连接来跳跃式启动车辆的机器人。该起跳装置包括一个移动机器人平台。该移动机器人平台包括一个与要启动的车辆的电压相匹配的储能装置,并有足够的功率来执行这一功能。该储能装置还用于向机器人平台(直接或通过DC/DC转换)和可选的发电设备(例如:燃料电池启动能源、发电机点火等)提供电力。储能装置也能够从车辆总线或可选的发电装置上充电,并且能够为静默观察操作提供能量和电力(可以与车辆在对接舱中内部携带,也可以通过临时外部连接)。跳跃式机器人包括使用该机器人转移辅助静默观察能量以及自主启动军用车辆的方法,例如在海军舰艇上,作为日常维护的一部分。目前,车辆的起动是通过一个便携式的起动装置完成的,该装置被卷到车辆上,由人手动连接。虽然自主、半自主或远程机器人平台目前正被用来提供一些军事功能,但目前还没有以这种方式完成跳跃式启动。