在联合全域指挥与控制(C2)传感器网络和美海军的 "超配项目"中,无人系统(UxS)是一种共享能力,它扩展了军事力量的范围和能力,以加强在有争议空间的战术。这增加了对可互操作的网络框架的研究,以安全和有效地控制分布式无人系统部队。迄今为止,陈旧的技术、分离和专有的商业惯例限制或掩盖了对新兴产业技术的追求,这些技术提供了当今现代化部队所需的安全功能,留下了更多的问题而不是事实。此外,UxS的功率和处理限制以及受限的操作环境禁止使用现有的现代通信协议。然而,消息层安全(MLS)的发展,一种安全和高效的团体通信协议,可能是UxS团队的理想选择。这篇论文记录了从一项定性研究中收集到的结果,发现MLS是UxS小组安全和效率的最佳选择。它还记录了MLS与ScanEagle无人机(UAV)和海军信息战太平洋CASSMIR无人水面艇(USV)的整合。该实施方案提供了一个作战概念,以证明使用MLS在多域特设网络配置中为无人机和USV之间提供安全和高效的C2和数据交换。所进行的实验是在一个虚拟环境和物理UxS中进行的。
引言
对联合全域指挥与控制(JADC2)架构至关重要的是多样化的无人系统(UxS)和传感器。这些不同的设备将使以人机协作为中心的未来海上力量相互连接。
例如,考虑一个联合全域用例,即无人系统提供针对近距离对手的能力。UxS的指挥和控制(C2)依赖于通信链路--其安全性和设计决定了在对手攻击的情况下的速度、互操作性和伤害能力。相反,在相同的C2通信链路中的不足或使用传统的架构会转化为战术和战略上的劣势,有可能将传统的作战部队置于危险境地。我们的研究旨在确定和实施一个可行的C2链路安全方案,该方案有可能为分布式多域环境中的UxS提供一个安全、可扩展和可互操作的解决方案。
目前,美国防部(DOD)和美海军部(DON)正在取得重大进展,以利用整个企业的独特任务和机会[1]。这些新的可能性包括增加对无人系统和传感器的使用,使之超越目前的使用案例平台。在实现无人平台和系统的数据共享时,网络安全必须被视为众多核心技术中的重中之重。这些努力必须考虑确保关键的推动因素,如网络、基础设施和C2,以及强大的安全协议和认证方法。这些考虑将变得至关重要,因为JADC2企业试图从分离转向更统一的数据环境,在对手已经开发出高度复杂的反介入和区域拒止(A2/AD)能力的情况下,所有的人都可以访问[2] 。
在今天的现代战争中,作为分布式力量倍增器的UxS将取决于安全和高效的C2。随着UxS发展的成熟,对互操作性的需求将增加。这项研究分析了当前和新兴的安全协议,并将其与JADC2和 "超配项目"的要求相匹配,以评估和确定支持这些要求的最佳属性和协议。然后,这项工作根据所需的安全排列选择消息层安全(MLS)协议,以便在UxS平台上实现可行性,特别是记录程序ScanEagle无人驾驶飞行器(UAV)。
近邻的对手继续追求A2/AD能力,以击败传统的美国军事力量。假设UxS的网络和物理安全属性没有得到解决或设计得不好。那么其他的核心技术,如定位、导航和定时、可靠性、互操作性、通信以及平台的感知和决定能力都会退化或受到损害。从目前孤立和陈旧的认证过程迁移到一个有效的集成开发、安全和操作环境,对于成功地将用户体验平台和传感器纳入JADC2环境是至关重要的。这种迁移也受到了挑战,因为需要从传统的技术和开发框架迅速发展到快速出现的技术,这些技术更有能力在近距离威胁的进展中保持相关性[3]。解决这一挑战将需要将技术障碍与文化、财政、程序和政治上的孤岛融合起来[4]。一旦美国防部解决了这一挑战,它将有能力实现无缝整合、同步和安全,这对无人机成为多领域作战的力量倍增器是必要的。
1.1 问题陈述
在一个技术竞争迅速的时代,JADC2基础设施依赖于20世纪90年代构思的技术(如IPSec[互联网协议安全]和TLS[传输层安全]),同时被限制在美国家安全局(NSA)制定的通用协议和标准下进行安全通信[5]。这些网络安全协议是点对点的,每增加一个新的网络设备,都需要与每一个现有的网络设备建立单独的信道,这就是指令概述。尽管在成立之初是最前沿的,但值得注意的是,几十年后的今天,我们仍然依赖这种点对点的安全连接,在动态自治设备网状网络之上强行建立一个高延迟和过时的安全覆盖层。整合改进不仅需要评估适当的现代替代方案,还需要一个能够及时有效地用新兴的行业解决方案解决UXS安全挑战的操作授权(ATO)程序。
为了解决这些问题,我们提出了以下研究问题:
-
JADC2和Overmatch项目的C2协议安全要求是什么?
-
根据在JADC2相关领域工作的国防部主题专家,现代C2安全协议需要哪些功能来满足JADC2环境的需要?
-
哪种安全协议能最好地满足所有这些需求,以及UxS C2链接的使用可行性是什么?
1.2 范围
这项研究支持整个美国防部和美海军部关于当前规范的讨论,不充分的网络安全做法和认证程序决不能阻碍无人驾驶系统的通信安全的未来状态。这些方法必须不断发展,以充分解决我们的传感器和无人驾驶资产在高度技术性的同行竞争威胁中对速度和安全的日益增长的需求。
这项研究支持整个美国防部和美海军部关于当前规范的讨论,不充分的网络安全做法和认证程序不得阻碍未来的无人机通信安全状态。这些方法必须不断发展,以充分解决我们的传感器和无人驾驶资产在高度技术性的同行对手威胁中对速度和安全的日益增长的需求。
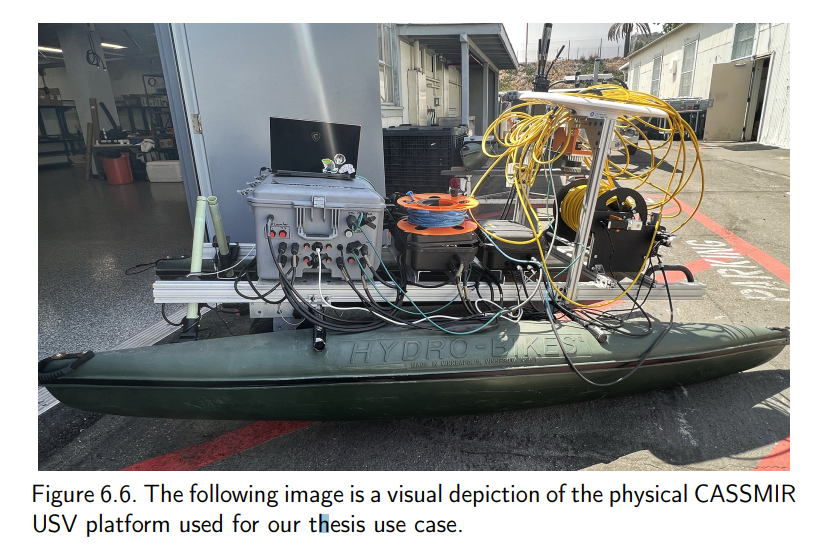
基于研究结果,一个选定的协议在受控的实验室环境中被实施、测试并进行虚拟基准测试。在成功完成受控的虚拟测试后,虚拟实施过渡到在NPS自主飞行器研究中心(CAVR)ScanEagle无人驾驶飞行器(UAV)和海军信息战中心-太平洋(NIWC-PAC)合作自主系统对峙海上检查和响应(CASSMIR)无人地面飞行器(USV)上的实际应用。
在本论文中,无人系统和无人车之间没有任何区别,不分领域,即空中和水面;都被称为UxS。
然而,在实验过程中,测试将发生在无人机和USV上。这项研究的目的是解决对不依赖平台的C2链路安全协议解决方案的需求。
通过混合方法(定性和定量)的研究工作,实现以下主要目标是本论文的贡献:
-
进行定性研究,确定JADC2和Overmatch项目的UxS安全协议需求。
-
将定性研究结果与对当前军事和工业安全协议选项的评估结合起来。
-
为多域作战(MDO)UxS用例选择一个可行的安全协议选项。
-
在最佳网络条件下实施和评估选定的安全协议,用于UxS模拟。
-
在ScanEagle和CASSMIR上实施和评估所选择的安全协议。
1.3 相关研究
UxS的研究空间是巨大和不断发展的。正如本节所讨论的,UxS安全的主题已经在各个研究领域得到了研究和记录。然而,将不同的协议与军事要求进行比较,以制定C2协议标准,提高安全性、效率和互操作性的研究有限。尽管如此,选定的先前研究提供了与我们的研究有关或支持我们研究的见解。
来自俄勒冈大学、南佛罗里达大学、海军研究生院和凯斯西储大学的研究人员,专注于建立基于性能和安全之间平衡的最有效的密码文本算法或密码框架[6]-[8]。这些论文解释说,我们目前最常用的密码套件对于小型UxS来说,计算量和功率都太大,例如Craziefile 2.0,它使用ARM Cortex M-4架构,工作频率为168 MHz。其他研究则是研究用于开发UxS的软件的安全基元,如机器人操作系统(ROS),并解释了安全漏洞和缓解措施,以实现无人系统的安全、可靠部署[9]。最后一项研究揭示了这些基础技术的脆弱性和保护它们的必要性。
从相关的研究来看,重点是寻找最佳的拓扑结构、路由协议或数据信息传递,以支持越来越多的无人驾驶系统和传感器一起工作和运行[10], [11]。这些工作大多旨在通过将传输的开销成本降到最低,找到维持C2的最有效方法[10], [11]。其他的UxS研究课题侧重于网络安全的最佳实践,强调在无人系统中发现的漏洞到可能的新攻击载体和可能的缓解技术之间的范围[12]。
有过多的指导和研究概述了要求和解决方案;然而,没有一个真正量化了国防部和海军内部无人系统平台和传感器的C2链接安全的重要性。更少的指导和研究将协议和算法与这种需求相匹配。相关研究表明,这些观点并没有直接涵盖选择和使用标准化协议的整体性,以提高UxS C2链路安全、效率和互操作性。这些方法考虑了密码器的内部性能、ROS软件的安全服务和能力、UxS的脆弱性和整体网络性能。本论文旨在研究一个标准化安全协议的实施,该协议可以作为应用层的安全软件,与设备和互联网协议网络无关。
有大量的指导和研究概述了UxS的安全需求;然而,没有一个真正量化了这些军事用途的安全需求。从美国防部和海军部的UxS平台和传感器的C2链路安全的重要性的现实世界经验。
1.4 论文组织
本论文的其余部分组织如下。
第2章概述了JADC2和Project Overmatch倡议,以了解这些倡议的安全协议要求。本章还讨论了美国国家标准与技术研究所(NIST)和美国国家安全局在加密协议的标准化和选择方面发挥的作用。它回顾了安全通信协议的工业和军事安全方法、相关性能以及通过使用专有和基于标准的安全协议解决的安全问题。
第3章提供了一个定性研究,包括面向网络安全的访谈问题。研究的对象是在安全、自主设备和传感器网络、获取或重叠方面有经验的军事、民事和承包商人员。从访谈中收集到的数据为国防部和国防部深入了解UxS的通信安全现状以及相关的网络安全和认证程序提供了更深的理解。
第4章根据第3章和第2章的结果进行交叉分析,提供了协议的比较和选择。它讨论了专有的和标准化的安全协议,这些协议是第2章中讨论的网络和倡议的关键网络安全组成部分。它还将美国防部和美海军部的UxS安全要求与定性研究的结果以及所讨论的当前和新兴的安全协议相匹配,以选择UxS平台的C2所需的最有能力的安全协议。
第5章概述了MLS在MDO UxS情况下的方法和实施。它描述了MLS和ROS的结构。它概述了协议功能概述,代码开发阶段,以及为支持实施而创建的核心功能。它还涵盖了用于创建MLS指挥和控制(C2)应用程序(MLS C2)与ROS接口的分步方法概述。
第6章讨论了在5中开发的各种MLS应用程序的实验,并分析了其对研究用例的影响。这一章包括对测试过程的描述和对结果的描述。
第7章提供了一个结论,涵盖了本论文研究的意义,对研究进行了总结,并推荐了继续工作和替代方法的选项。