无人机具有快速部署、成本低廉等优势. 无人机空地网络通过将基站设备部署至升空无人机平台,能从空 中快速构建对地覆盖网络,因而在应急救灾、偏远覆盖、智能交通、智慧城市等方面具有广阔的应用前景,近年来 受到广泛关注. 面向无人机空地网络应用场景,结合无人机的机动、组网、载荷等特点,围绕无人机空地网络覆盖 性能提升、无人机空地网络通感算一体化设计、智能反射面技术辅助的无人机空地网络、鲁棒无人机空地网络四 个维度,从网络场景、关键技术挑战、性能优化控制方法等几方面梳理无人机空地网络的研究现状,并探索优化提 升无人机空地网络性能的未来研究方向.
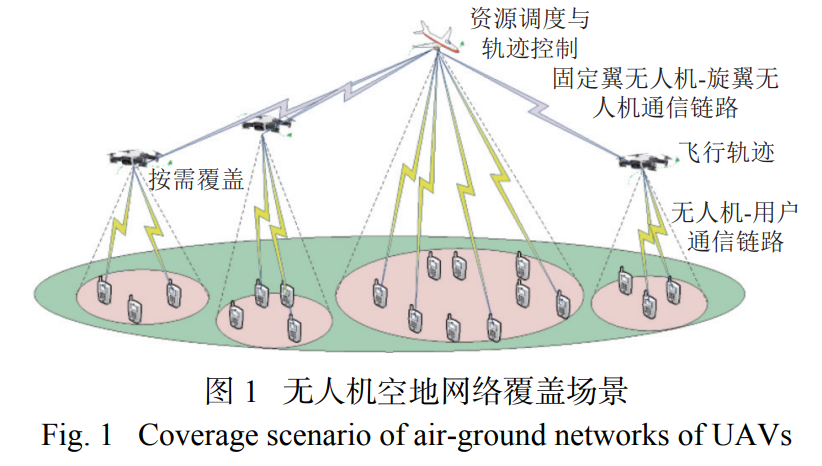
以多旋翼和固定翼为代表的无人机设备因具有 低成本、快速部署、易于操控等优势,近年来得到了 迅速发展. 依托无人机平台也形成了多种新型应用 模式,无人机空地网络就是其中的典型应用代表[1-2] 该网络通过将原安装于地面的基站设备部署至升空 无人机平台,利用无人机的低成本和快速部署优势, 构建无人机间、无人机与地面间网络连接,以从空中 实现对地覆盖网络,从而有效解决地面通信基础设 施受损或偏远地区的网络覆盖问题[3-4] . 无人机的空中机动性使得原有地面通信网络部 署方案不再适用,提升基于无人机的空地网络覆盖 性能是构建无人机空地网络的基础. 在应用方面,伴 随着自动驾驶等新型应用模式的涌现,网络内生感 知和计算能力也成为无人机空地网络的关键需求之 一,在考虑无人机平台机动属性前提下提升无人机 空地网络的通信、感知、计算综合能力也成为适配该 应用场景的核心问题[5-8] . 面对城市、山区等空地环境 复杂、遮挡较强的场景,智能反射面(RIS)等新兴通 信技术可以辅助改善通信传输环境,是提升无人机 到地面终端间通信质量的一个重要手段[9-12] . 此外, 无人机易受复杂多变天气地形等工作环境影响,多 无人机协同组网易受相互之间的干扰影响,如何提 升无人机空地网络的鲁棒性能,构建无人机空地鲁 棒网络,适配不同工作环境、复杂组网及干扰环境, 保障无人机空地网络的安全可靠高效运行,也是无 人机空地网络的核心研究问题[13-18] . 针对无人机在上述空地网络覆盖性能提升、无 人机空地网络通感算一体化设计、RIS 辅助无人机 空地网络、无人机空地鲁棒网络设计维度的性能提 升和关键挑战,已有的综述论文并未进行充分论述. 本文将围绕上述场景,进一步结合无人机的机动、组 网、载荷等特点,从关键技术挑战、性能优化控制方 法等方面探讨无人机空地网络的研究现状并探索提 升无人机空地网络性能的未来研究方向. 1 无人机空地网络覆盖性能优化 1.1 网络场景 地面基站通常布设成本高、建设周期长、对地形 地貌要求高,无法在偏远和灾害地区提供通信服务. 为填补地面基站覆盖空缺,可以利用无人机快速部 署优势,通过将通信设备加装到无人机上形成空对 地覆盖网络,实现为大型灾害现场提供应急通信保 障,为无通信基础设施区域提供临时通信服务,为偏 远地区提供传感器数据收集等应用. 如图 1 所示,无人机空地网络以固定翼或多旋 翼无人机为平台,以单架无人机或多架协同组网的 方式提供对地的网络覆盖服务. 固定翼与多旋翼无 人机特点各不相同,因而所能提供的对地覆盖能力 也不同. 具体而言,固定翼无人机承重载荷量大,对 通信设备的重量限制较少,但需要快速飞行来维持 升空能力,因此,当加装通信设备后,固定翼无人机 的机动特性可能导致其无法对同一地面区域提供 持续稳定覆盖[19] . 而多旋翼无人机具备空中悬停的 功能,能够为地面同一区域提供持续性的网络覆 盖 [20] . 此外,为充分利用固定翼无人机与旋翼无人 机的优势,固定翼无人机与旋翼无人机可以同时向 地面用户提供覆盖服务. 在多类型无人机共存的混 合网络中,固定翼无人机飞行高度高、有效载荷大 的特点使其通常作为网络的控制与调度中心,实现 资源与轨迹的联合管控,并承担与用户和旋翼无人 机通信的功能. 旋翼无人机可以根据地面用户的业 务需求提供灵活、多样化的服务,通常被视为近地 面基站.