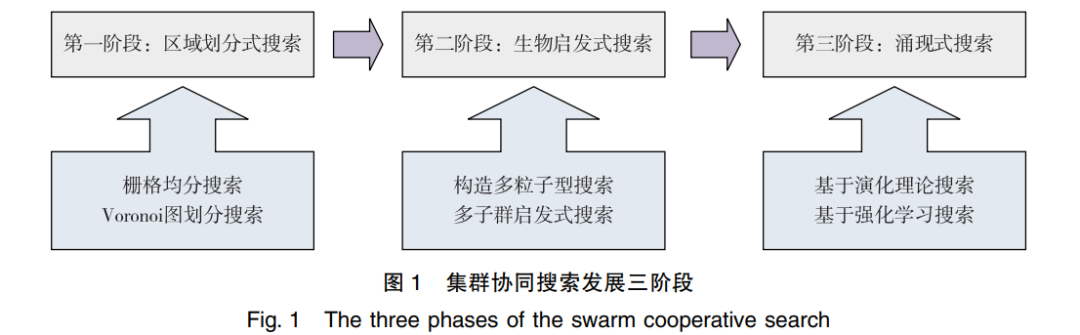
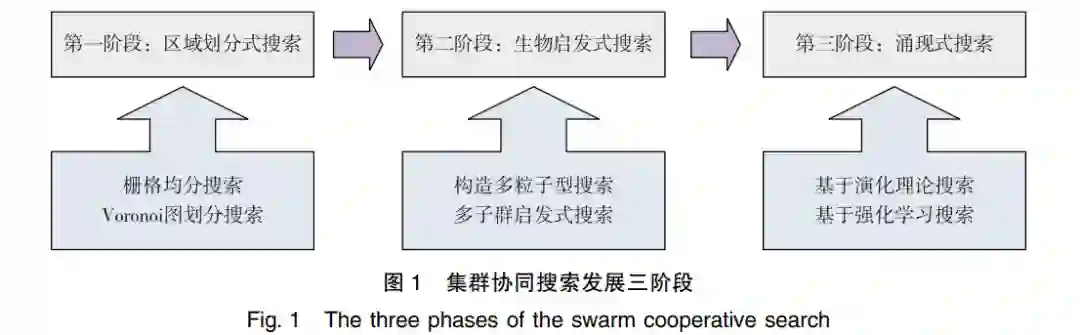
无人机集群协同区域搜索能够有效地获取任务区域地面信息,降低环境不确定度。基于区域划分、机群均衡分配以及启发式算法的传统集群协同区域搜索方法依赖于事前设计规则且计算量大,属于不可生成规则算法。考虑任务环境不确定性,算法须满足快速性、智能性和鲁棒性,基于涌现理论的无人机集群协同搜索方法因信息融合能力强、具有高度的智能性而被采用。演化学习算法和强化学习算法是涌现理论中主要组成部分,这两类算法可根据不同的环境和任务生成新的集群行为规则。将系统分析和总结当前无人机集群协同搜索方法研究现状和进展,并据此指出现有研究中的不足以及未来的发展方向。无人机在速度、机动性和隐蔽性方面有优势,目前已经被广泛应用于区域侦察、环境监测等领域。随着任务环境的日趋复杂,单无人机由于所携带载荷单一导致作业能力有限,已不能满足用户需求。无人机集群由于相互协作提高了整体的系统效能,系统整体涌现出的能力远超内部单体的能力之和,因此无人机集群的研究逐渐受到关注。无人机研究从单机研究过渡到集群研究,集群任务范畴也从单一任务向多任务协同发展[1⇓⇓⇓-5]。目前,无人机集群协同搜索领域的研究方法分为2类:第一类基于传统的不可生成规则的搜索方法,其中包括传统的基于精确数学建模方法和基于启发式算法的搜索方法;第二类是可生成新规则的搜索方法,主要包括基于演化学习的搜索方法和强化学习的搜索方法。传统的集群协同搜索方法中基于精确数学建模的方法主要以回字形或者并行扫略的方法进行搜索,如何进行合理的区域划分是研究重点。基于启发式算法的集群协同搜索通过对无人机参数、目标搜索概率图等进行建模和更新并将无人机类比于启发式算法中粒子和基因以探索更多解空间来找到更适合的搜索方案,该类型搜索算法是当前研究热点。这种搜索方法需依附于启发式算法架构本身才能表现出足够的智能性且不能生成新的搜索规则。基于演化理论以及强化学习的集群协同搜索方法能够在与环境以及自身的不断交互中产生最优规则,属于可生成规则的协同搜索算法。基于演化理论的协同搜索算法设计思想是通过设计集群单体间局部行为规则而后通过行为演化而产生群体行为,通过这个过程可以产生多种搜索行为,行为的智能度更高。基于强化学习的集群协同搜索方法中,集群通过个体不断和其他个体以及环境进行交互,达到最佳回报值或者设定目标,具备良好的自学习和在线学习能力,可以快速而准确地获取环境信息从而降低环境的不确定度,较好地适应未知复杂环境。本文将对集群协同搜索方法中不可生成新规则的传统搜索算法以及可生成规则的基于演化理论以及强化学习的协同搜索算法研究现状和进展进行分析并对其优缺点进行对比,同时提出无人机集群协同搜索算法未来发展方向。作者将集群协同搜索方案发展分为三个阶段:第一阶段,区域划分式搜索阶段;第二阶段,生物启发式搜索阶段;第三阶段,涌现式搜索阶段,如图1所示。