国外有人/无人平台协同作战概述
导读:近年来,随着武器装备的飞速发展,美、欧等军事强国开展了一系列面向未来战争的作战理论探索和关键技术实践,以“认知、动态与分布”为特点的分布式体系化作战样式正在逐步成型,有人/无人平台协同作战作为典型的作战样式更是得到了广泛的论证。仅就目前来看,以有人机/无人机为代表的武器平台系统设计技术研究,能够在复杂战场中以较低的经济消耗,取得更大的军事效益。
有人/无人平台协同作战是在分布式协同作战理念指导下应用较为广泛的典型作战模式。未来战场上,无人作战平台的应用将不可避免,它既可使作战部队面临的风险降到最小,又可使作战手段多样化,将大大增强作战能力和战场指挥官的应变能力。然而无人平台的智能化水平不可能在短期内达到有人平台的程度,且存在对卫星导航依赖性过强、与地面站通信不稳定、对战场变化临机反应能力弱等问题。在未来相当长的一段时间内,无人平台难以取代有人平台独立完成复杂的作战任务,无人平台和有人平台的关系必将是相互补充而不是取而代之的关系,两者分工协作,可以将各自的效能发挥到最大。下面视频为潜艇与UUV及AUV的协同作战简介。
从视频中可以看出,在进入敌方海域时,潜艇首先派出无人潜航器(UUV)进行海域探测,并将探测后的信息传回潜艇;之后潜艇又发射潜射无人机(AUV)进行岸基探测,在了解整体敌方部署后潜艇准备发起攻击。潜艇与UUV、AUV的协同配合,在完成任务的前提下,有效避免了潜艇面临的风险。
此外,无人机/有人机同样是典型的案例,无人机可以充分利用其机动能力强、成本低、隐身性能好的优势,在恶劣条件下实施作战攻击任务,消除有人机飞行员执行任务的风险,而有人机则可以充分利用人的智慧和综合判断能力,排除干扰,在复杂条件下自己驾驶作战飞机或指挥无人机实施作战攻击。因此,构建有人/无人协同作战体系,利用人的决策优势更好发挥无人作战平台特点,实现整体作战效能最大化,成为今后一个时期内比较现实可行的空中作战方式。

波音公司展示的忠诚僚机项目图
目前以美欧等国为首的军事强国已经在有人无人协同作战方面取得了阶段性的成果,开展了多项有人机/无人机协同作战的项目验证,典型的项目包括战术管理系统项目(TBM)、无人机控制最佳角色分配管理控制系统(SCORCH)、体系集成技术与试验(SoSITE)、“忠诚僚机”项目和拒止环境中协同作战(CODE)项目等。

有人机/无人机协同作战效果图
战术管理系统项目(TBM)是由美国海军研究实验室(NRL)研发的一项采用人工智能技术的软件系统。该系统采用智能体在模拟的超视距空战任务中,引导有人机/无人机编组的无人“僚机”,旨在实现有人机飞行员对无人机编队的控制,简化无人机和有人机的协同作战控制。

专家飞行员使用TBM智能软件负责控制无人机“僚机”
战术管理系统项目(TBM)主要构成因素包括目标推理、计划、行为识别和预测等,核心部件为行为识别器、计划执行预测器和计划器组件,通过组件之间的规划协作执行主动行为识别。下图显示了战术管理系统项目(TBM)的高级构架,TBM通过抽象接口从空战模拟器接收原始的不完美状态信息,原始数据由图中的“知识边缘更新器”处理加工,解析相关的状态信息并填补系统知识中可能存在的空白。
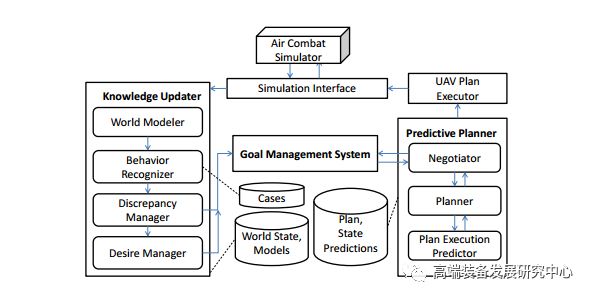
战术管理系统项目(TBM)高级架构图
无人机控制最佳角色分配管理控制系统(SCORCH)项目由美国陆军航空发展局于2013年8月启动,旨在开发出一套无人机控制系统,可使空中任务指挥官同时管理多架无人机,从而在不增加操作人员工作量的情况下提高任务效率。SCORCH系统提供了一项独特的协同整合能力,将人-机互动、自主性和认知科学领域的最新技术进一步融合到一套整体的作战系统中。SCORCH系统由智能无人机自主行为软件和高级用户界面组成,系统界面针对多架无人机控制进行了优化,设有具备触摸屏交互功能的玻璃座舱、一个配备专用触摸显示屏的移动式游戏型手动控制器、一个辅助型目标识别系统以及其他高级特性。
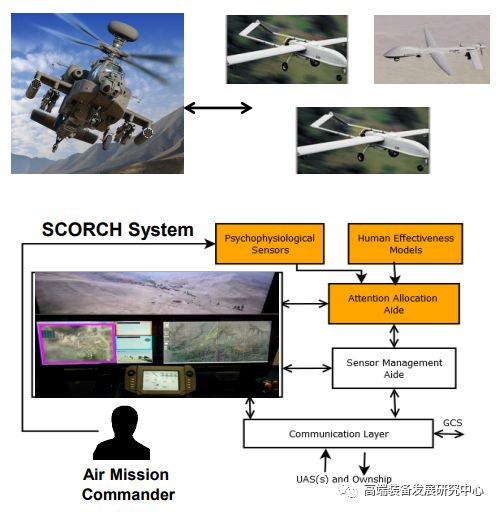
无人机控制最佳角色分配管理控制系统(SCORCH)
SCORCH系统允许一名空中任务指挥官同时有效控制3架无人机;机上任务指挥官可将控制任务委托给一架或多架无人机,并在任务达到关键决策节点时通知任务指挥官;16名陆军飞行员利用该系统完成了为期2天的训练、试验和反馈。试验结果表明,SCORCH系统在不增加指挥员工作负荷的情况下提高了陆军的态势感知能力和任务成效。

SCORCH系统显示界面
体系集成技术与试验(SoSITE)项目是由美国DARPA发起,旨在将武器与传感器载荷从单一庞大的空中平台拆分到大量有人和无人平台上,运用开放系统架构方法,实现平台间实时数据共享、多机组网、协同配合及平台上不同任务模块的即装即用、无缝连接,形成分布式的空中作战体系。

体系集成技术与试验(SoSITE)项目
SoSITE项目将利用现有航空系统的能力,使用开放系统架构方法在各种有人和无人平台上分散关键的任务功能,如电子战、传感器、武器、战争管理、定位导航和授时以及数据/通信数据链等,并为这些可互换的任务模块和平台提供统一标准和工具,如有需要可以进行快速的升级和替换,从而降低全新航空系统的研发成本和周期,并使得美军运用新技术的能力远快于竞争对手。
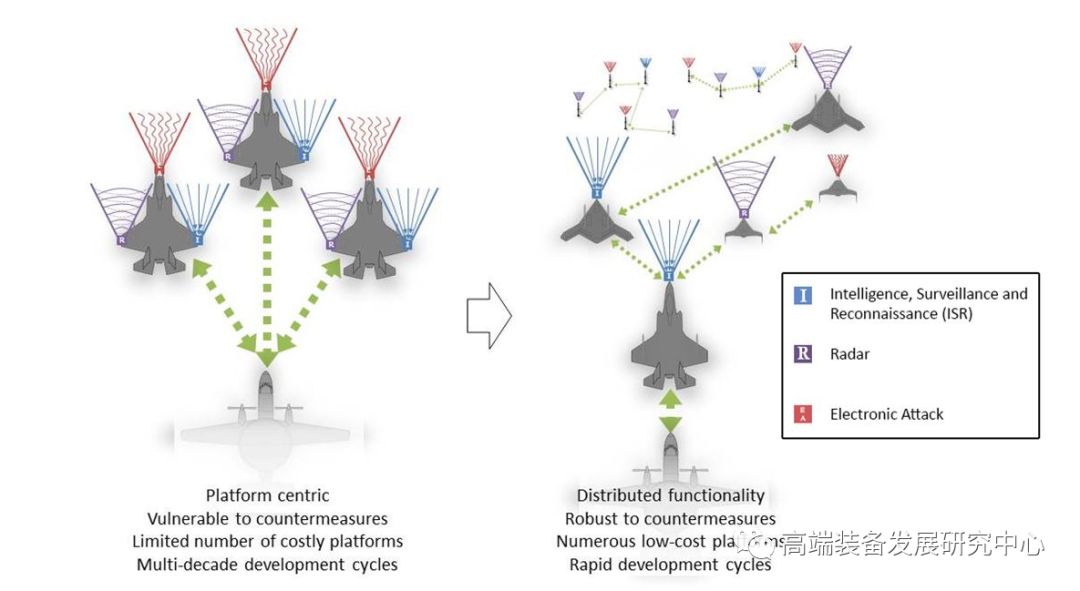
SoSITE项目分布式空战概念图
“忠诚僚机”项目由美国空军研究实验室(AFRL)于2015年中旬发起,旨在使第五代战机(长机)的驾驶员可以对无人机(僚机)进行控制,大幅度提升美国空军的有人/无人机协同作战能力。具体目标包括:提供高效人机编队中的灵活的自主系统;实现多种机器协同编队执行任务目标;确保可在复杂、对抗环境下作战;确保系统在未知、动态环境下的安全、高效。

“忠诚僚机”项目
在2017年巴黎航展期间,美国展示了其最新研制的UTAP-22“鲭鲨”(Mako)和XQ-222(现称XQ-58A) “女战神”(Valkyrie)两款无人机,作为下一代有人战斗机的僚机,具有高机动性、隐身性特征,并可携带武器弹药及相关传感器。UTAP-22无人机在BQM-167A靶机基础上改装,并搭载了多种先进传感器,不但可作为有人战斗机的“忠诚僚机”伴随作战,还可完全自主或半自主地合作执行蜂群战术。该机目前已知的可用载荷包括翼尖电子战吊舱、AN/ALE-47机载先进诱饵撒布系统等。据悉,除使用美军现行的Link16数据链对其实施控制外,还为其配备了更加先进的“战术目标瞄准网络技术”(TTNT)数据链。
XQ-222(XQ-58A)项目源于AFRL的低成本可耗损式打击展示计划(LCASD),类似第五代战机的机身,能够远距离为战斗机提供侦察和预警信息,并可对敌方空中和地面目标实施打击,有效降低有人战机损伤的风险。XQ-222无人机采用V形尾翼、低雷达截面积设计,具备隐身能力,配备节能高效的WJ-33发动机,可以在机腹或两翼部署武器。

XQ-222(XQ-58A)示意图
拒止环境中协同作战(CODE)项目由DARPA开发,旨在通过有人机指挥侦察和攻击无人机(UAVs)在电子干扰、通信降级以及其他恶劣运行环境中,进行侦察监视、火力打击、电子对抗、中继通信等任务分配与自主协同,共同完成作战任务,提升体系作战能力。CODE无人机群在执行任务的过程中可以相互或向指挥官分享数据,共同协商任务分配,实现行动同步。

CODE项目作战概念图
CODE项目特别注重协同自主领域技术的提升,使得无人机组可以在一个操作人员的管理下协同工作。无人机将不断判断其自身和周边环境,并为任务操作者反馈无人机组行动建议。操作者可以允许、不允许或让无人机组收集更多数据。采用CODE技术的无人机将可发现目标,并根据建立的交战法则与目标交战。并在最小人员参与情况下,调用临近的采用CODE技术的无人机;适应与友军之间的摩擦或意想不到的敌方威胁等突发情况。
总结:由于无人平台的智能化水平不可能在短期内达到有人平台的程度,在未来相当长的一段时间内,无人平台难以取代有人平台独立完成复杂的作战任务,无人和有人的关系必将是相互补充而不是取而代之的关系,无人平台和有人平台优势互补,分工协作,可以将各自的效能发挥到最大。国外已经在有人/无人平台协同作战进行了验证,我国同样应该抓住作战智能化的发展趋势,在未来战争中取得优势。
主要参考文献:
1.杨帆,董正宏.有人/无人平台协同技术与行动模式研究[J].国防科技
2.杜壮,刘刚.有人机与无人机协同作战系统关键技术研究[J].科技创新与应用
3.刘丽君,涂天佳.舰载有人直升机/无人机典型协同作战样式分析[J].电子技术与软件工程
4.许莺. 有人机/无人机协同作战技术初探[A]. 中国指挥与控制学会
5.黄松华. 有人/无人分布式作战体系关键技术浅析[A]. 中国指挥与控制学会
6.Human-Agent Teaming as a Common Problem for Goal Reasoning
7.A Goal Reasoning Agent for Controlling UAVs in Beyond-Visual-Range Air Combat
转自丨高端装备发展研究中心
往期热文(点击文章标题即可直接阅读):







