针对雷达海面目标识别特征数据缺乏和识别算法推广能力差等问题,从雷达目标电磁散射特性和目标分类识别两方面总结了雷达海面目标识别技术的研究热点和发展趋势。围绕海面目标雷达特性,从电磁散射测量和建模两个方面综述了国内外研究现状;从低分辨雷达回波、高分辨距离像、高分辨雷达图像3 方面综述了海面目标识别技术发展现状;介绍了雷达海面目标识别工程应用情况;最后展望了海面目标识别技术的发展趋势。
雷达海面目标识别技术研究进展

目前,中国面临的海洋争端和非传统安全威胁日益严重,迫切需要提升海面探测雷达技术水平。可靠的雷达海面目标识别对准确判断敌方作战意图、制定正确作战方案、支持火控打击等环节十分重要,是高层次态势评估和威胁估计的主要依据。研究如何从众多舰船及角反射体组成的多目标群中识别出目标舰艇,已成为对海雷达的一项重要课题。雷达海面目标识别可大幅提升海战场态势感知深度,可靠区分民用船只及军舰以避免误伤,在舰艇编队中有效鉴别所需舰船,精确定位舰船的关键部位等。这些环节的优化对提升雷达海面探测能力十分重要。
海战场覆盖区域辽阔、态势瞬息万变,要求操作人员在最短时间内做出最准确的判断,但仅仅依靠人员经验主观判断,无法满足海量数据实时处理和稳健识别的要求。雷达目标识别是从目标的雷达信号回波特征中提取能反映目标属性信息的稳定特征,由机器根据一定的判别准则对目标做出类别或型号判决。海面目标密集分布、数量众多、种类繁杂、运动状态多样多变、姿态稳定性差、伪装隐蔽干扰、海面杂波动态多变等因素严重降低了目标特征提取的稳健性;雷达目标特性数据不完备、可信度低,人工设计的识别特征复杂环境、适应性差等问题进一步限制了目标识别算法的工程推广能力和性能提升。海面探测雷达目标和杂波环境的复杂性、目标识别自身技术瓶颈等众多问题,使得海面目标识别存在较大难度。
目前,中国海面目标识别工程应用水平较低,部分海面探测雷达具备一定的目标粗分类功能,但尚不具备可靠的目标精细分类识别能力,限制了雷达的信息化、智能化应用水平。针对这些问题,本文首先总结海面目标电磁散射特性研究现状,然后围绕海面目标识别主要技术途径和应用情况进行梳理,在此基础上对海面目标识别技术发展趋势进行分析和预测。
海面目标电磁散射特性对海面目标精确识别具有重要意义,国内外学者通过电磁散射建模求解、微波暗室紧缩场测量和动静态外场测量等手段对海面目标电磁散射特性进行了广泛研究。根据海面目标特殊性,其电磁散射特性分为海面目标电磁散射特性、海面目标与背景复合散射特性2个方面。
海面目标电磁散射特性
海面舰船目标具有超大尺寸和复杂外形结构等特点,通过分析舰船甲板、船舷和塔台等主要散射源的电磁散射特性,能为舰船目标分类识别提供先验信息,主要包括特性测量和电磁散射建模计算等技术途径。
世界各国普遍采用特性测量方法获取高可信度海面目标电磁散射特性数据,例如美国的Junction Ranch测试场(图1)、河谷路口牧场雷达横截面积(radar cross section,RCS)测试场、雷达图像测量系统(RIMS)试验场、舰船飞机HRR(一维距离向)/RCS 测试场等均具备海面目标特性测量能力,为美国海军、空军提供大量测试数据。Junction Ranch测试场为室外静态俯视测试场,具备远距、宽频带、全极化RCS测量能力,试验水域为80ft×110 ft(24.384 m×33.528 m),能够模拟海洋环境对舰船模型目标进行RCS测量,测量机制如图2所示。中国航天科工集团第二研究院207所、中国航天科技集团公司第八研究院802所等研究机构也建立了外场目标散射测量系统,开展了海面外场环境全尺寸目标散射特性的研究。

图1 Junction Ranch 测试场
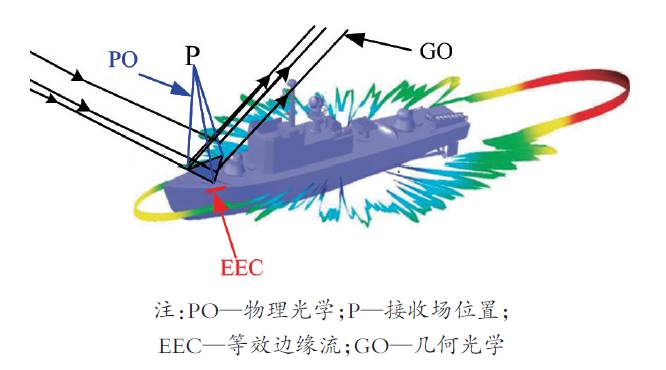
图2 舰船目标高频散射机制示意
电磁散射建模计算方法可以大幅降低海面目标特性数据获得成本,便于获取其他国家军用目标特性数据。舰船电磁散射建模需要精细考虑船体结构镜面散射(甲板、天线罩、炮管外壁等)、多次散射(开口结构、组合结构、凹面结构等)和绕射(边缘、尖顶、弯折不连续等)等复杂散射成分。目标电磁散射计算主要包括全波数值方法和高频近似方法2种方法,全波数值方法计算精度高,但对于舰船目标这类电大尺寸目标而言计算过于复杂、耗时严重且实现难度大。因此,通常采用高频近似方法来获得散射场,简化舰船目标散射特性求解的复杂度。以物理光学法(PO)、物理绕射理论(PTD)和射线弹跳法(SBR)等为代表的高频渐近方法在复杂舰船目标电磁特性的高效计算中具有显著优势。这些方法各有优缺点,例如物理光学法无法反映舰船中腔体、二面角散射,射线弹跳法对舰船表面散射区耗时巨大,因此,以孙占久为代表的学者提出将复杂目标整体由表面散射、边缘散射和腔体散射分别处理再叠加计算的方法,实现了大型军事目标的电磁散射特性计算。
此外,舰船微动特性分析通过研究舰船在海面上的姿态变化引起雷达回波的多普勒调制特性,有效地提高了舰船目标识别性能,得到广泛关注。
海面目标与背景复合散射特性
海面目标电磁散射特性离不开所处海面环境的影响,包括海面对入射场的改变、目标/海面间的耦合等。为了给目标识别系统提供精确的目标电磁散射特性,目标与环境的复合散射特性分析必不可少。目标与环境复合散射要求建立目标/环境一体化模型,一体化计算,这给算法和计算能力提出了很高的要求。
南非科学和工业研究理事会的X波段Fynmeet RCS测量系统成功用于海面目标RCS测量与管理,该系统具备X波段宽频段、全极化、大带宽海面目标特性测试能力,能够搭载在飞机、舰船或者固定在海边山顶实现海面目标特性外场测量(图3)。中国航天科工集团第二研究院207所、中国航天科技集团公司第八研究院802所等对造波池及上方目标的复合散射特性进行了测量,开展了室内外目标复合电磁散射测量和理论模型研究。

图3 南非Fynmeet 动态RCS 测量系统
针对海面目标与环境复合电磁散射建模,国内外学者主要从数值法、高频近似法、混合计算法等方面展开研究。数值法将海面目标建模为一维粗糙面上方叠加二维目标的复合散射精确求解问题,对电大尺寸的舰船目标存在计算量过大的问题,通常需要配合加速计算方法使用。高频近似法利用物理光学法、等效电磁流法等电磁计算方法提高海面目标复合散射的计算速度。混合计算方法采用解析方法计算粗糙海面的电磁散射,利用数值方法计算舰船目标的电磁散射,目标与环境间的耦合通过四路径模型或通过耦合散射迭代过程求解得出。西安电子科技大学郭立新团队系统地研究了海面与漂浮目标的复合雷达电磁散射特性,建立了实际粗糙海面电磁散射及其与漂浮目标复合电磁散射的理论模型,并分析了雷达参数(入射角、极化方式、微波段等)、海态参数(风速1~5级、风向、海水盐度、温度等)、目标参数(尺寸、吃水深度等)对耦合作用的影响(图4)。
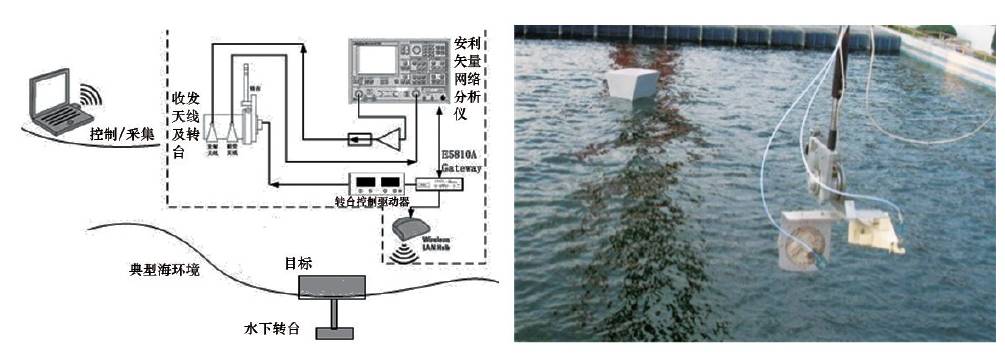
图4 西安电子科技大学复合电磁散射测量系统
为实现可靠的远距离多层次海面目标分类识别,需要综合低分辨雷达回波、高分辨雷达回波、雷达合成孔径雷达/逆合成孔径雷达(SAR/ISAR)图像等各类特征数据,各类特征数据优缺点如表1所示。
表1 海面目标识别特征信息比较

雷达面临复杂海面作战环境,即海面目标密集分布、数量众多、种类繁杂、运动状态多样多变,使海面目标识别算法性能和使用受限,众多密集多样的海面目标环境要求目标识别算法具有较高的实时处理及稳健的特征分辨能力。其次,海面目标识别时回波信杂噪比低,参数估计精度不足以支撑稳健的海面目标分类识别。如何在复杂海面作战环境中提取海上目标稳健的特征是海上目标识别技术的关键。
低分辨雷达海面目标识别
低分辨窄带雷达结构原理简单、中国装备数量多,今后相当长一段时间内仍是中国军队海面探测雷达主流。虽然窄带回波含有的目标信息少,但提取的特征参数反映了目标的本质特征,例如航速可用于揭示目标机动能力,RCS可反映了舰船目标的大小和吨位,时域波形、微动等特征则可以直接映射到特定海情下的舰船类型等。利用低分辨雷达特征作用距离远的优势,可用于远距离目标分类。
目标的RCS是表征目标对入射雷达电磁波散射能力的物理量,可以反映目标的尺寸、形状、材料等信息,可用于舰船目标的大、中、小目标分类。由于海上目标运动速度慢,其RCS 值近似连续变化,且每一类目标RCS特征值有所不同,使得基于RCS序列的海上目标分类识别成为可能。
由于目标窄带特征有限,现有技术大多基于窄带回波的时域波形的特征提取,这类技术首先利用傅里叶变换克服时域的时延敏感性,接着利用离散梅林变换克服回波的尺度、比例变换提取不变特征,然后将特征输入不同的神经网络进行识别。这类技术相对成熟,可以用于目标粗分类,在型号中已有应用。国外典型代表为The University of Cape Town的Inggs,他比较了不同神经网络对舰船目标识别的效果;中国典型代表为国防科技大学郭桂蓉,他将此类方法用于某岸基雷达的舰船目标分类。
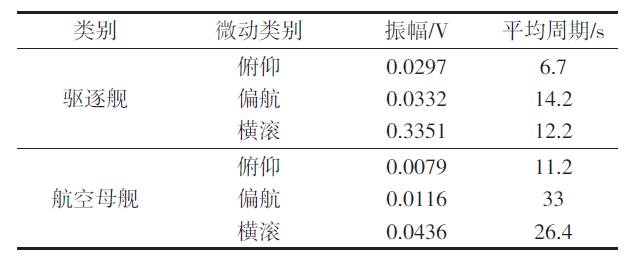
在窄带雷达探测海面运动舰船时,由于螺旋桨、发动机等部件的推进会使得舰船在横滚、俯仰和偏航方向上存在微动,而这种微动与舰船类型和海情相关,可用于目标分类与识别。表2为5级海情下航空母舰和驱逐舰的三维微动参数。基于微动舰船的雷达回波特性分析,可通过时频变换提取相应的微动周期,并与参考周期对比获取海面目标的类型。一般假设,舰船目标的俯仰和偏航的微动相对于横滚的微动非常微弱。
表2 5 级海情下舰船三维微动参数表
高分辨雷达海面目标识别
相比于低分辨雷达,雷达高分辨距离像(HRRP)可以反映目标沿雷达径向的尺寸和结构等特征,它对雷达系统无约束易于获取,因此更有利于目标识别的工程实现。基于HRRP的海面目标识别技术可以分为基于特征提取和基于模板匹配的海面目标识别技术。
海面目标特征可以分为几何结构特征、统计特征和电磁特征。基于HRRP提取的舰船目标几何结构特征包括目标径向投影长度、离散性、对称性、质心等,可以跟踪姿态角信息反推目标径向物理长度。HRRP的统计特征一般具有平移不变性,常用的统计特征有中心矩、高阶累积量或高阶谱等。舰船目标的电磁特征包括散射中心特征及极化特征,它可以反映目标的大小、结构、材料及散射属性。最终,将提取的舰船目标特征输入分类器便可实现舰船目标的识别,常用的分类器包括最大相关系数、最近邻模糊分类器、支撑向量机(supported vector machine,SVM)、稀疏分类器、神经网络分类器等。
基于模板匹配的雷达海面目标HRRP识别方法的思路,则是通过对训练数据分帧处理,构造不同目标的时域或频域模板库,将测试样本与模板进行匹配实现目标的分类识别。也有学者提出通过统计建模的方法,构建HRRP与模板的相关系数和识别率的联合概率,提高舰船目标识别率。
雷达高分辨图像海面目标识别
高分辨雷达成像会受到舰船摇摆和成像条件限制,不易获取且成像距离近,但反映了目标二维精细结构,刻画了目标的细节特征,更有利于舰船目标的识别。雷达成像机制不同于光学成像,不同结构和构造的舰船有可能在雷达图像上非常相似;姿态角的变化会导致同一目标的雷达图像发生较大改变。因此,如何提取舰船目标的不变特征量是舰船目标分类识别的重点。一般地,基于SAR/ISAR的目标识别一般可以分为3步:预处理、特征提取和分类识别。
舰船目标SAR/ISAR像通常面临着由复杂海面环境造成的相干斑噪声和目标散焦导致条带噪声污染。预处理是指从海面背景中提取目标,降低噪声的影响,提高图像的质量。最常用的预处理手段是阈值分割的方法,首先设置全局阈值分割降低相干斑噪声的影响,接着设置局部阈值降低条带噪声的影响。此外,还可采用小波降噪、统计建模及知识辅助等手段降低海杂波噪声的影响。
舰船目标特征提取是识别的关键,将直接影响分类器设计和识别性能。目前,可将舰船目标雷达高分辨图像特征分为几何结构特征、电磁散射特征、变换域特征和局部不变特征4类。不同于其他目标的几何结构特征,舰船目标中心线、主桅杆数目和位置及顶层建筑编码是舰船目标分类识别的关键特征;舰船中心线是指连接船头和船尾中心的直线,可采用Hough、radon变换等坐标投影变换手段进行提取;在舰船中心线垂直方向为中心的范围内搜索幅度归一化后最大几个值的位置,可提取桅杆的特征;通过对舰船目标上层建筑到中心线距离的分布编码可以获取目标的顶层建筑编码。舰船目标的电磁散射特征主要有峰值特征、散射中心特征和极化特征,它与目标的散射特性相关因而更能反映目标的本质信息。舰船目标的变换域特征虽然不具备物理意义,但由于其可将目标映射到低维空间且无需相关先验知识,因此是目标识别的常用特征;常用的变换特征有小波变换、主成分分析、独立成分分析等。由于SAR/ISAR图像具有姿态敏感性,因此提取局部不变特征可以有效提高目标识别的性能,常用的局部不变特征有Hu矩、SIFT和广义不变矩等。最终将提取的特征输入分类器,可以进行舰船目标的分类与识别。
图5为海面舰船目标ISAR图像的识别流程。对于舰船目标原始图像(图5(a)),首先利用阈值分割的方法对目标进行分割结果(图5(b)),接着对分割后的图像进行轮廓提取、中心先检测及尺寸估计等特征提取,分别如图5(c)~(e)所示,基于SVM分类方法利用特征向量进行训练,获取训练特征分类器;最后对测试样本提取特征输入分类器获取分类结果。

图5 高分辨海面目标识别示意
雷达海面目标识别的工程应用是国内外学者一直致力解决的问题。国外在此方面的研究起步早,已有多型雷达具备目标识别能力(表3)。
表3 雷达海面目标识别典型应用
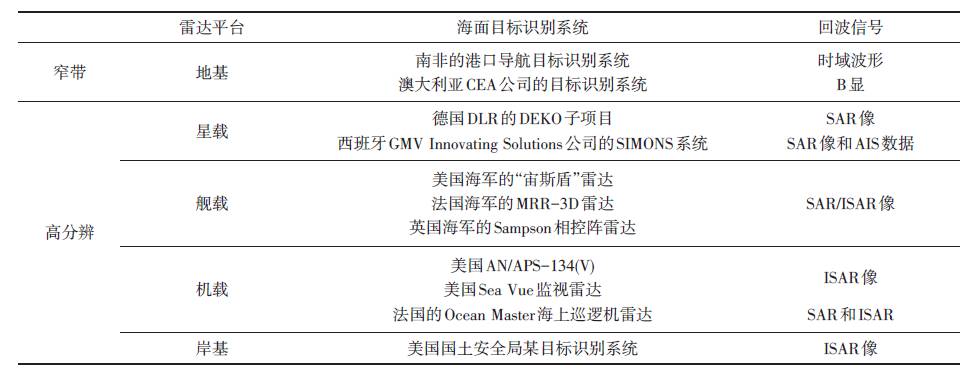
早期的雷达系统采用时域波形和B显轮廓像的方式,典型的雷达系统有:加拿大Leung 开发的海面警戒目标识别系统,可实现对3类小目标的准确鉴别;南非Micheal开发的港口导航雷达目标识别系统,对5类目标的正确识别率>90%;澳大利亚CEA公司开发的港口监视雷达目标识别系统、美国于20世纪70年代提出的舰载雷达识别系统,利用B显轮廓像,可实现对目标的大、中、小准确分类。
近年来,国外已有多型雷达利用高分辨模式实现了海面舰船目标的分类与识别。在星载雷达方面,西班牙GMV Innovating Solutions公司开发的SIMONS系统,利用SAR图像和船舶自动识别系统(AIS)数据,对部分船只正确分类率接近60%;德国宇航中心(Deutsches Zentrum für Luft-und Raumfahrt,DLR)的DEKO星载监视雷达利用SAR图像,可对舰船目标聚类和初步分类识别,对结构明显的3类船只分类率达到81%。在岸基雷达方面,美国国土安全局开发的目标识别系统,利用ISAR像可实现海上目标实时识别。在机载雷达方面,美国的AN/APS-134(V)反潜/对海监视雷达、Sea Vue监视雷达已具备ISAR图像目标识别技术功能;法国对海监视的Ocean Master海上巡逻机雷达,可以利用SAR和ISAR对目标进行识别和分类,图6为其ISAR成像画面;AN/APS-506多模雷达的改进型采用SSAR模式,装备于加拿大空军的CP-140“Aurora”飞机,可以实现对舰船、潜艇远距离的探测和分类;日本的F-3战斗机载雷达AN/APG-81(V)1具有空对面的舰船识别功能;英国的“Sea King”直升机配备的“Search Water”雷达,具备用于探测和识别不同类型船只和小艇的高分辨模式。在舰载雷达方面,美国海军的“Aegis”雷达、法国海军的MRR-3D雷达及英国皇家海军的Sampson相控阵雷达,都集成了高分辨率目标识别模式;英国皇家海军装备的舰载“Sea-Wolf”导弹系统,可以在导弹发射前就对威胁目标的性质进行识别和判断等。
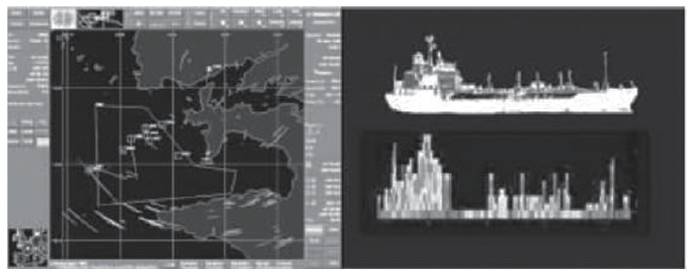
图6 Ocean Master 雷达监视和ISAR 成像画面
中国在海面舰船目标分类尚不具备系统的理论体系,工程应用水平较低。据报道,国防科技大学在某岸基对海警戒雷达上利用低分辨信号实现了海面目标的识别。但目前,中国各型海面搜索监视雷达基本不具备目标精细分类和型号识别能力,部分雷达通过对海面目标ISAR成像实现了辅助目标识别,但距离工程实用还有一定距离。
目前,雷达海面目标识别技术虽然已取得一定的理论和技术成果,但是能够真正走向实际工程应用的却不多。究其原因是由于雷达探测的目标、环境极其复杂,雷达系统性能的限制导致获取的目标信息较为有限。相对于传统的目标探测,雷达目标识别需要测量更深层次的目标特征,将占用更多的时间、频谱、能量等雷达资源,给目标识别的工程实现造成较强的约束。近年来,国内外越来越重视雷达海面目标识别技术研究和工程应用实践,呈现出以下几个研究热点和趋势。
1)利用岸基、舰载、机载或星载等各自平台传感器优势,融合雷达、红外、电子侦收(ESM)、AIS等多源特征进行海面目标综合识别,解决同一目标多源特征时空匹配关联和异源特征数据融合识别等问题,克服单一传感器目标特征不确定性,实现高置信度海面目标识别。
2)结合认知雷达技术体制优势,通过认知发射闭环反馈和目标识别波形优化设计获取海面目标稳健特征,雷达系统设计在考虑检测跟踪性能的同时,充分兼顾目标识别对雷达的需求。
3)逐步建立完备的海面目标特征数据库,采用电磁散射计算和动静态测量相结合的方法,利用实测数据迭代校验,提高目标与海面复合电磁散射模型精度,进一步提高电磁散射计算的速度和精度,解决实测数据样本不完备和数量少等问题。
4)借助人工智能最新成果,采用机器学习、深度神经网络等模式识别技术,学习训练高分辨距离像、SAR/ISAR像等包含海面舰船目标的雷达回波数据,提高目标识别模式分类器的泛化能力,克服单纯人工设计的目标识别特征复杂环境适应性差、算法工程推广能力低等问题。
总之,雷达海面目标识别涉及平台雷达、传播衰减、目标特性、环境杂波等一系列复杂因素,涵盖了雷达信号处理、数据处理和模式识别等众多领域,存在较高的技术难度和工程应用瓶颈,已成为海面探测雷达功能性能提升的关键技术。随着现代雷达技术和人工智能应用的飞速发展,雷达海面目标识别技术必将迎来一个崭新发展阶段。
参考文献(略)
(编辑 王志敏)
本文作者: 贺治华,段佳,芦达。
作者简介 : 贺治华,中国航空工业集团公司雷华电子技术研究所,高级工程师,研究方向为雷达目标识别、微动特征分析等。
注:本文发表在2017年第20期《科技导报》,欢迎关注。本文部分图片来自互联网,版权事宜未及落实,欢迎图片作者与我们联系稿酬事宜。
《科技导报》
中国科协学术会刊
联系电话:010-62194182
欢迎投稿:lina@cast.org.cn
长按二维码 即刻关注

登录查看更多
相关内容

Arxiv
3+阅读 · 2018年9月17日
Arxiv
10+阅读 · 2018年4月28日




相关VIP内容
相关资讯
相关论文
Arxiv
3+阅读 · 2018年9月17日
Arxiv
10+阅读 · 2018年4月28日