无人机蜂群作战技术与多智能体系统理论
来源丨智胜空天
转自丨智能巅峰
作者丨杨东岳
01
概 述
无人蜂群作战是指一组具备部分自主能力的无人机在有/无人操作装置辅助下,实现无人机间的实时数据通信、多机编队、协同作战,并在操作员的指引下完成渗透侦查、诱骗干扰、集群攻击等一系列作战任务。无人蜂群作战系统可填补战术与战略之间的空白,以多元化投送方式快速投送到目标区域执行多样化军事任务,包括与其他武器平台协同攻击海上、空中、地面目标及ISR等,实现对热点地区战略威慑、战役对抗、战术行动。
无人机蜂群一般由一组承担不同作战任务的无人机群组成,其执行任务简单的流程如下图所示:由大型运输机作为母船前出至任务区域并释放无人机组,无人机蜂群进行编队并俯冲至任务区域展开协同作战行动,任务完成后返回母船。
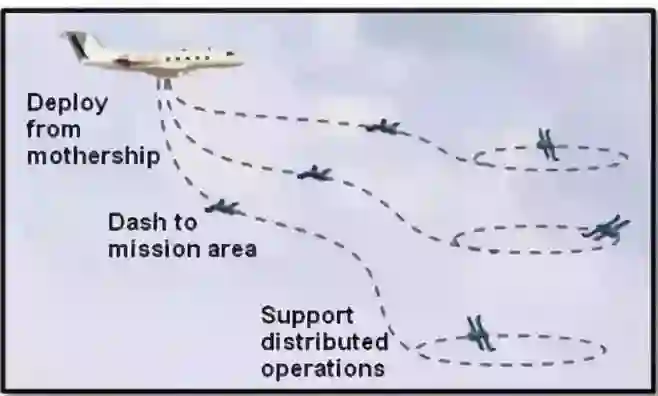
图1 无人机集群作战流程
最初无人蜂群作战技术来源于多智能体系统理论,一般将无人机蜂群作战技术中的无人机视为智能体(Agent),执行任务的无人机编队视为一个多智能体系统(Multi-agent Systems)。本文将从理论角度简单介绍无人机蜂群作战技术与其背后的多智能体系统理论之间千丝万缕的联系。
02
前 世
一.多智能体系统(MAS)理论的发展
群体行为(Swarming Behavior)是自然界中常见的现象,典型的例子如编队迁徙的鸟群、结队巡游的鱼群、协同工作的蚁群、聚集而生的细菌群落等等。这些现象的共同特征是一定数量的自主个体通过相互合作和自组织,在集体层面上呈现出有序的协同运动和行为。
因此在该方面的研究早期,大量的工作集中在对自然界生物群体建模仿真上。学者们通过大量的实验数据,探究个体行为,个体与个体之间关系对群组整体行为表现的影响。1987年,Reynolds提出一种Boid模型,这种模型的特点为:(1)聚集:使整个组群中的智能体紧密相邻;(2) 距离保持:相邻智能体保持安全距离;(3)运动匹配: 相邻智能体运动状态相同。这种模型大体概括描述了自然界中群体的运动特征。1995年,Vicsek 等人提出一种粒子群模型,这种模型中每个粒子以相同的单位速度运动,方向则取其邻居粒子方向的平均值。该模型仅实现了粒子群整体的方向一致性,而忽略了每个粒子的碰撞避免,但是仍为群体智能体建模方面做出了重要贡献。

图2 自然界中生物群集活动现象,其中最主要的特点是群集活动中的个体生物可以依据相邻个体状态自主规划自身状态
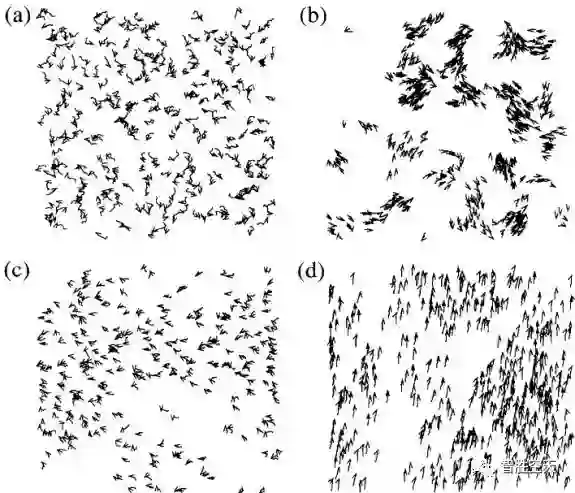
图3 1995年Vicsek提出的粒子群模型,可以看出在一段时间之后所有粒子最终都沿着相同方向运动
随后,对多智能体系统的研究进入“网络化系统与图论描述”阶段。具体是指:群体系统是由许多个体通过某种特定的相互作用所形成的一类网络化系统。个体之间的相互作用关系在数学上可以利用图论方法进行描述和研究。在此阶段,学者们在对自然生物群落建模仿真的基础上,从对表象模拟推演层面跨越到从理论角度探寻个体与系统整体之间的关系层面。最近,针对多智能体系统理论的研究进入实际应用阶段。大量的工作侧重于实际问题,尤其是工业、战争应用中出现的问题。无人蜂群作战技术就是诞生于该阶段。
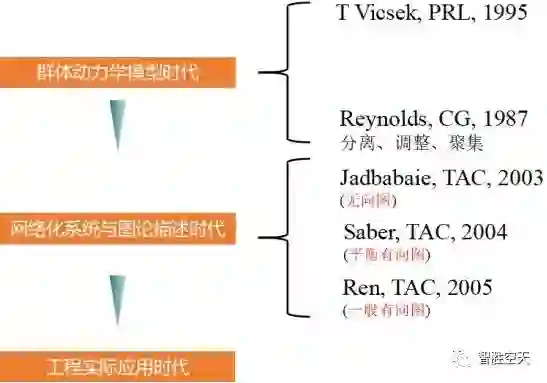
图4 多智能体系统理论发展历程
二.多智能体系统(MAS)理论的特点
从个体与系统的角度分析,多智能体系统具有“个体智能+通信网络=整体运动行为”特点。其中,“个体智能”是指组成群体系统的每个个体都具有一定的自主能力, 包括一定程度的自我运动控制、局部范围内的信息传感、处理和通信能力等。例如车流的形成和维持过程中, 每个司机通常只能根据其前后左右的相邻车辆的运动状态(相对距离和速度)来调整自己的运动状态。基于共同的加速或减速规则, 可以形成车流在整体上的有序运动。

图5 车流中的车无法获取整体车群的运动情况,只能相邻车辆进行加速或者减速
综上所述,多智能体系统具有如下特点:
(1)分布式:又称去中心化。整个群集系统中不存在中心控制器控制所有的智能体,每个智能体均具有一定的自主能力。该特点使得多智能体系统具有良好的鲁棒性,具体表现为执行任务的无人机蜂群中即使有若干架无人机因故障或者被攻击丧失功能,剩下的无人机可以在重新组网之后继续执行任务,提高了战场生存能力。
(2)智能体自主化:顾名思义智能体是指具备一定的位置共享,路径规划及障碍规避能力。具体表现为蜂群中的无人机可以根据一定的规则自主飞行,将指挥员从繁重的作战任务中解脱出来,必要时又可以进行人工干预。
(3)复杂功能分布式化:当要求一个对象具备多种复杂功能时,难以设计合适的控制方案对其进行控制。在多智能体系统中,多个结构功能相对简单的智能体可以通过协同的方式完成多种复杂的任务。具体表现为可以对无人蜂群作战系统中的无人机装备不同设备与武器来完成渗透侦查,火力压制以及目标摧毁等多种作战要求。
03
今 生
一.当前军用无人机作战在实战运用中存在的主要问题
当前军用无人机主要存在如下两方面问题:
1.单机机载功能有限:
(1)单机机载设备的侦察能力有限,很难有效地全方位连续侦查和监视目标;
(2)单机的武器载荷有限,使打击威力和效果受到限制;
(3)被赋予任务日趋复杂多样,需要的传感器数量和种类不断增加;
2.单机抗未知因素能力弱:
(1)一旦发生设备故障,容易导致任务被延误,甚至被迫取消;
(2)在面临高威胁防空体系时,容易被拦截和毁伤,导致任务失败;
(3)地面控制链路较难对多架无人机同时控制,导致空中无人机数量偏少;
为了解决上述诸多问题,各军事强国对在未来无人机作战研究及发展的思路上有着不同的发展方向,如隐身化、高速化、小微型化、大型化等。但均意识到无人机单机的作战能力已很难有较大提高。因此提出了一种新的无人机作战方式那就是蜂群作战技术。

图6 高空投放的密集固定翼无人机编队组网协同作战
二.无人机蜂群作战技术中有关MAS的关键技术
1.无人机蜂群作战系统中的同/异构主体问题
无人机蜂群作战技术的理念是对自然界中蜂蜜和蚂蚁族群的仿真,并且该系统中要同时兼备实施侦察,攻击以及防御等功能。蜂群中的无人机所携带的作战武器,通信设备存在一定的差别,因此无人蜂群作战系统包含了丰富的异构主体(Heterogeneous Agents)。
(注:一般地,在MAS理论中,如果系统中的所有智能体的动力学模型均相同,那么称该多智能体系统中的智能体是同构的,反之则是异构的。)
目前针对无人机蜂群作战技术作用机理的研究仅限于4种形式即:近战(Melee)、聚合(Massing)、机动(Maneuver)和群集(Swarming)。并未形成符合现代战争特点的技术-战术集成体系。
在有人-无人机(蜂群)协同作战方面,作为空中指挥者的有人机其机载武器、通信设备等均与蜂群中的无人机不同,因此可以将有人-无人机协同作战系统视为一个异构动力学的多智能体系统。

图7 美国海军公开X-47B与F/A-18协同测试的照片
2014年8月,美海军首次进行有人驾驶舰载机与舰载无人机在航母上共同起降。在试验中,两架F/A-18“大黄蜂”战斗机和一架X-47B舰载无人机以相同的模式从“罗斯福”号核动力航母上起飞,以此来测试这种舰载无人机的起飞和降落能力。有人机与无人机协同作战难在空中控制,美国今后研究的重点是无人机的空中控制能力。
2.无人机蜂群作战系统中的通信拓扑网络问题
在多智能体系统理论中,数学上一般使用图论来描述智能体(无人机)之间的通信拓扑结构。从通信方向方面分类有:有向拓扑与无向拓扑;从通信拓扑结构方面分类则有:固定拓扑与时变切换拓扑。在无人机蜂群作战技术方面,一般采用时变切换拓扑结构,在执行不同任务时无人机之间可以采用不同的通信拓扑结构连接,在任务完成之后又可以切断连接。
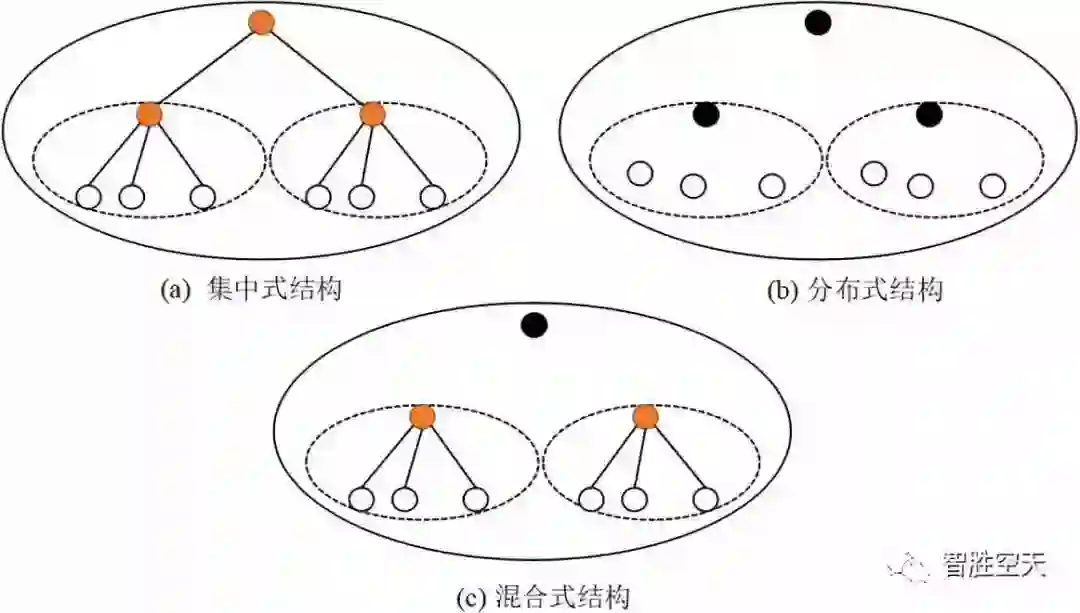
图8 控制多个对象时采用的三种控制/通信结构
3.无人机蜂群作战系统中的飞行编队控制问题
在无人蜂群作战系统中执行任务的无人机最基本的动作要求就是可以保持一定的队形进行编队飞行。现对已经提出的关于多自主飞行器协同编队方法进行讨论:
(1)领导者-跟随者(Leader-follower)法。在该方法模拟鸟群编队飞行的生 物活动,将一个无人机指定为领导者(即长机),其他无人机则被指定为跟随者(僚机)。跟随者们以一定的偏置量跟踪领导者的位置和方向。
(2)一致性(Consensus)法。该方法最初来源于多智能体系统的一致性问题,该问题目的是通过对系统中的每个智能体(无人机)设计分布式控制算法,使所有智能体所有状态值达到相同的值。在此基础上对每个智能体设定一定的偏移量,以达到特定的飞行队形。
(3)基于行为的控制。该方法的基础是将主要控制目标分解为任务或者行为。该方法还可以处理诸如碰撞避免,中心聚拢,障碍回避等复杂群体行为运动。
04
展 望
随着人工智能以及各种智能控制算法的不断发展,基于多智能体系统理论的无人机蜂群作战技术在充分发挥数量优势的情况下,可以完成侦察,渗透以及打击等一系列战术任务,并在此基础上构建起新型空中作战力量,有针对地提高作战能力。作为一项前沿的空中作战技术,无人蜂群作战技术的研究在未来将面向重点解决发展协同算法,提升无人机编队的自主协作能力;开发软件开放架构和支持框架;系统制造,集成与演示等基础问题。
往期热文(点击文章标题即可直接阅读):






