【学科发展报告】无人船

无人船是指依靠船载传感器,在水面进行自主或半自主方式航行的智能化平台,可广泛用于海洋运输、海洋环境调查、海洋资源探测、海洋考古、水上搜救、情报搜集、海事训练测试、侦察取证、警戒巡逻、火力打击、舰艇护航、反水雷和反潜等领域。无人船是网络化无人系统中的重要节点,将颠覆传统海战样式,催生全新海洋装备体系,对海洋资源开发和国家海洋权益维护具有重要的意义。我国民用领域已有实用艇型,艇长 10 米以下,主要面向海洋勘测、海洋环境调查、海洋考古等。军用领域处于研制阶段,艇长也为 10 米以下,主要面向警戒巡逻、火力打击和反水雷等。无人船相较其他无人系统,面临海洋环境恶劣(如强浪流涌等)和无人船运动模型特殊性(如模型高度非线性、强时滞性和时变性等)等特殊挑战[1]。
无人船信息领域的核心关键技术为感知,导航和控制。态势感知、航行规划和导航和控制之间的关系框图如图 1。航行规划和导航包含全局航路规划和局部反应式导航。同时可通过多艘无人船构成集群无人船,以拓展其能力。
(一)无人船态势感知
无人船的态势感知依据使用需求,配置各种传感器进行互补探测,实现自身状态和海洋环境探测;对探测信息进行由粗至精的融合处理,依据实际任务需求提取关键要素,构建多尺度、多维度立体综合环境态势图,实现无人船自身及其周围环境准确有效认知。
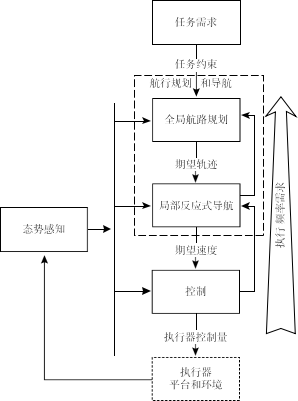
图 1 态势感知、航行规划和导航和控制之间的关系框图
无人船搭载传感器包括位置姿态传感器、激光雷达、相机(含可见光和红外)、雷达、声呐和AIS等。由于无人船本体和工作环境的特殊性,在态势感知方面除了光照、雾天等影响之外,还面临特殊挑战,如海面目标可观性弱、船体晃动剧烈、海杂波强和水下目标探测等。
哈尔滨工程大学提出了一种改进的UKF方法[2],对微小无人船上的姿态数据进行信息增强,提升无人船对其自身艘向角度、角速度和角加速度的感知能力,以应对低成本传感器感知能力不足问题,实现艘向控制。无人船经常面临运输、起吊和布放等操作,船载相机的标定参数有可能会发生改变。为此需要对其参数进行重新标定。通常无人船甲板面积有限,并且在海面作业时船体晃动严重,常规标定方法不适于无人船。上海海事大学将平面方格标定纸贴于圆柱体,实现无人船相机参数的自动标定[3]。华中科技大学针对海面图像目标检测的困难,提出基于目标属性和显著性的快速海面目标检测方法[4]。哈尔滨工程大学基于雷达图像数据提出了自适应图像平滑和鲁棒图像分割算法,实现海面目标检测,用于无人船高速避障[5]。上海大学针对激光雷达点云数据,采用中值滤波和点云数据聚类方法实现海面障碍检测,并在黄海南部用于“精海”无人船进行自主避障测试[6]。
(二)无人船航行规划和导航
航行规划和导航依据态势感知图,综合考虑任务需求、安全、效率、规则、操纵性和不确定性等因素,计算规划和导航关键要素,形成不同粒度的互容指令,在满足航行安全包线前提下,发挥无人船效能。无人船航行规划和导航面临特殊挑战,如海事规则多且具有模糊属性,船体模型时滞性大、惯性强且不同船型相差大。航行规划和导航分为全局航路规划和局部反应导航。局部反应导航分为跟随 / 跟踪导航和局部反应避障。
大连海事大学提出一种估计无人船侧滑角的预测器,实现基于预测视线的路径跟随[7]。大连海事大学利用扩展状态观测器对无人船侧滑角进行实时估计,并将其同视线导航结合以解决干扰条件下的路径跟随问题[8]。上海大学基于 Dijkstra 和人工势场法实现全局和局部航路规划[9]。哈尔滨工程大学在 Serret-Frenet 坐标系下,提出反向自适应滑模控制,解决模型和干扰不确定条件下的路径跟随问题[10]。哈尔滨工程大学基于改进反步方法实现无人船路径跟踪控制。上海海事大学提出了三种 PID 控制方法以解决常涌流干扰下的直线路径跟随问题[11]。
哈尔滨工程大学利用证据推理对危险进行评估,且根据评估结果利用满足海事避碰规则的相互避碰算法实现无人船的实时安全避障[12]。上海交通大学利用深度Q网络架构提出一种简化深度强化学习避障方法[13],以解决传统分析方法的控制律过于复杂问题。武 汉理工大学对海事避碰规则和航海技能进行定量分析,以实现无人船在公开海域的避碰航行[14]。武汉理工大学在极坐标系下对环境目标进行建模,同时将海事规则同粒子群优化 算法结合实现无人船局部避碰[15]。武汉第二船舶设计研究院和哈尔滨工程大学基于高速艇的运动和控制属性提出LROABRA 方法,实现高速艇(>20节)对静态障碍的避障[16]。上海大学提出一种改进人工势场法用于局部反应避障[17]。
(三)无人船控制
无人船控制解决航行过程中的动态定位,轨迹跟踪,路径跟踪等问题,使无人船具备丰富经验驾驶员的控制能力,成功稳定的做出各种航行所需动作。随着控制理论的发展, 海洋领域研究人员可将当前最新控制技术用于无人船控制。然而无人船的控制面临模型高度非线性和不确定性、系统欠驱动、船体本身和执行机构时滞性、执行机构饱和特性、不可预测的强外部干扰等挑战。参考文献[18]和[19]分别系统描述了海洋机电系统的控制和无人船航向保持的研究进展。
中国科学院沈阳自动化研究所基于主动 qLPV 方法对无人船进行模型辨识[20]。大连海事大学基于 MMG 分离建模思想对机桨一体推进无人小船进行模型辨识。同时基于多模型控制思想,提出了一种快速收敛的鲁棒控制器[21]。江苏大学基于复合误差主动抗干扰控制律用于抑制外部干扰[22]。上海大学基于 GPC-PID 方法实现了无人船的控制,并在黄海南部进行海试[6]。大连海事大学利用 smith 预测器和扩展状态观测器实现变延时的鲁棒控制[23]。大连海事大学提出了一种自适应鲁棒的有限时间方法用于全驱动无人船航迹跟 踪控制[24]。目前有些智能控制方法已应用于无人船中,以解决无人船模型不确定性和非 线性及其外界干扰问题。大连海事大学提出了一种自重构的自适应鲁棒模糊神经网络以解决模型和干扰不确定条件下的航迹跟踪问题[25,26]。大连海事大学采用一层隐含层前馈网 络的极限学习控制策略进行无人船跟踪控制[27],提出一种自适应鲁棒在线构造模糊控制 策略[28]。另外,实体控制系统执行器存在各种约束,比如响应速度、饱和性和耐用性等。控制器的设计过程中若没有考虑这些因素将会极大降低控制性能甚至发散。虽然很多控制器考虑幅度和速率约束,但是并没有考虑驱动器和无人船整体系统的动态特性[29]。江苏 科技大学通过艘向控制误差和有选择的丢弃某些控制包构建基于网络的控制模型,在保护舵系统的同时实现艘向的控制[30]。
(四)无人船集群控制
面对浩瀚且恶劣的海洋,单船能力显得格外薄弱。通过集群控制将多艘无人船联合构建成的集群,具有更少的感知约束、更大的作业范围和更强的抗风险能力,可增强无人船完成任务能力。尽管其他领域的集群,比如,无人机群,已研究多年并已取得很多成果, 但是由于海洋环境恶劣(如强浪流涌等)和无人船运动模型特殊性(如模型高度非线性、强时滞性和时变性等),使得其他无人集群技术无法应用于无人船。
大连海事大学将路径协同跟随控制分为两个层面:单船路径跟随控制层和基于网络通信约束的速度和航路规划层。路径跟随控制层采用反步和神经网络方法。速度和航路规划层采用图论方法[31]。哈尔滨工程大学面向集群目标跟踪、集群避障和集群内部成员避碰设计了分层控制架构。控制架构分为三层:集群战略层,运动规划层和控制输入层[32]。大连海事大学采用神经优化实现分布式集群导航,采用模糊方法对无人船的模型进行逼近,实现无人船路径机动集群控制[33]。哈尔滨工程大学基于模糊逻辑控制实现无人船集群编队控制[34]。大连海事大学基于模块化自适应控制实现集群编队控制[35]。大连海事大学基于降阶扩展状态估计器和有界运动控制律,实现无人船在闭合曲线的对称编队航行[36]。
(一)国际无人船研究趋势
无人船的发展将会借用已有无人系统成熟技术,根据实际过程中所面临的使用需求和挑战,快速形成无人船系统自身特有的技术体系和产品体系。如美国的无人船借用火星无人车“Rover”的CARACaS软件体系架构[37],以色列也借用了其在无人车和无人机上很多先进的无人技术。同时国外通过举办无人船赛事[38]和会议[39]及其建立无人船测试基地[40] 以提升无人船技术和推广无人船应用。
无人船将朝着体系化、标准化、智能化、群体协同化方向发展。体系化主要体现为无人船作为无人系统一部分,动态定制近期、中期和远期规划,形成系列化产品。标准化主要体现为设计标准模块化接口,根据任务需求对任务载荷实现快速换装,达到一船多用目的。智能化主要体现为利用多传感器融合处理技术、人工智能技术和控制技术,实现从人工干预到人工基本不干预,再到完全自主,逐步提升无人船的智能性。群体协同化主要体现为无人船之间的协同,无人船和人之间的协同,无人船和其他无人和有人系统协同,提升无人艇快速完成任务的能力。面向无人船的发展趋势,国外正逐步形成需求分析、科学研究、仿真验证、工程研制、实体验证和装备生成的完备体系。
(二)国内研究特色与差距
我国无人船的研究近几年获得了快速发展,正针对民用和军用领域需求开展广泛研究。我国无人船利用雷达、激光、视觉和海图信息已经具备一定的自主环境感知、路径规划、自主避障和自主控制能力,并能根据需求实现搭载相应载荷设备完成测绘、勘测、环境监视和巡逻等任务。然而我国无人船技术水平相对较低,同美国、以色列、挪威和英国等国家相比还是存在较大差距。除了船型、动力、通信技术和传感器技术外,在态势感知、航行规划和导航、控制和集群方面都有较大差距。
无人船为人工智能的重要载体之一,其适用范围很大程度上取决于无人船的智能性。随着我国对人工智能领域的重视,我国无人船的发展趋势将会在借鉴已有无人技术基础上,面向任务需求,将无人船同人工智能进行深度融合,实现智能船集群协同控制。为此,无人船发展应以国家重大战略需求为导向,依托国家人工智能发展战略规划,制定递归系统的无人船发展规划,以智能感知、智能规划、智能控制和集群协同为突破点,将工程和理论实现有机统一,形成产学研用良性循环有机整体,推动相关理论基础和技术水平提升,带动无人船其他相关核心技术和产业发展,提升我国在海洋机器人领域水平,实现我国在机器人领域弯道超车。
无人船主要有三个应用方向:军用船、科考船和海运船。军用方面,无人船的能力可以从侦查、威慑、抵制威胁和攻击等方面成为海军的主要力量倍增器。科考方面,无人船可以搭载相应的探测设备实现无人有人协同探测,减小测绘人员的工作强度,降低测绘人员的危险。海运船方面,具有降低人工成本、节能降耗、减少事故的优点。随着无人船智能性的提升,其将会被广泛应用于海洋运输、扫雷、反潜、巡逻、科学考察、测绘、事故监测及救援、石油开采等领域。无人船必将成为第一个具有突破意义的无人产业化支柱。业界人士预计,全球无人驾驶船市场规模 2019 年可能达到大约 100 亿美元。
随着各海洋强国和大国对海洋的重视,各国将会利用已有的无人技术基础,以需求为导向,针对无人船面临的特殊问题和挑战,加快无人船关键技术理论体系研究,尽快形成体系化和标准化的无人船装备,提升国家在海洋装备体系水平。美国和以色列等无人船强国,在已有无人系统技术基础上,经过数十年体系化的积累,已形成较完备的理论和技术体系。虽然我国已有相应的无人船产品,但大多数产品的自主程度较于国外还有一定差距,特别是体系化的规划和理论创新。
内容节选自《控制科学与工程学科发展报告》
往期文章推荐

🔗【重要通知】中国自动化学会关于2019年度国家科学技术奖提名工作的通知
🔗【重要通知】关于征集2019重大科学问题和工程技术难题的通知
🔗【NIIS2019】九院士荟聚岛城,2019国家智能产业峰会开幕在即
🔗【全国学会优秀改革案例汇编】学会治理结构与治理方式:会员(代表)大会
🔗【NIIS2019】大咖齐聚共绘健康蓝图,2019国家智能产业峰会智慧医疗平行论坛即将在青岛召开
🔗【全国学会优秀改革案例汇编】学会治理结构与治理方式:理事会(常务理事会)
🔗【NIIS2019】创新驱动发展,智造引领未来 ——2019国家智能产业峰会智能制造平行论坛即将在青岛召开






