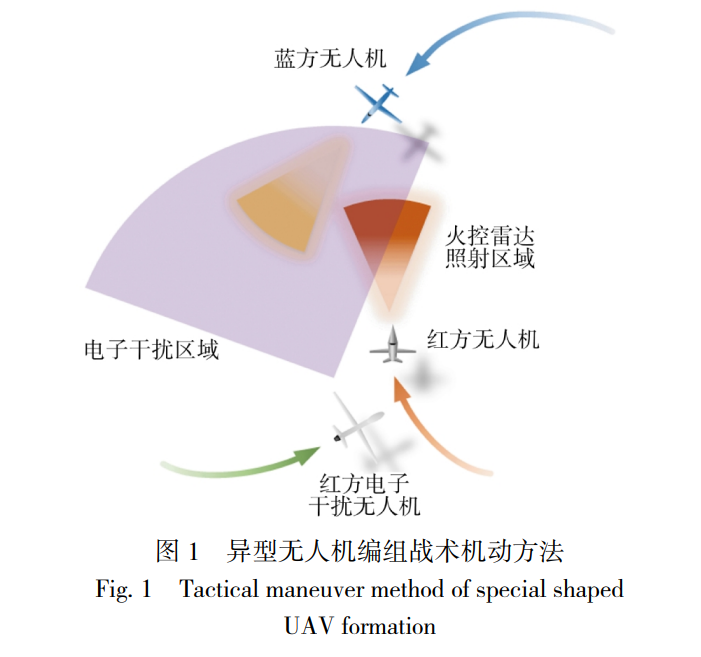
通过异型无人机(unmanned aerial vehicle, UAV)的协同作战, 可极大丰富空中作战样式, 提高空战战损比. 双机编队是最基 本的协同作战单元, 具有较大的研究价值. 针对无人机协同空战可能面临的不同空中态势, 分别设计歼击无人机和电子干扰无人 机的机动决策模式, 通过不同模式下的算法切换实现更好的协同作战. 基于一致性理论设计了无人机的编队飞行与伴随干扰算法. 根据动态的空战对抗特性, 设计自适应的动态栅格环境, 可更好地支撑路径规划与机动决策. 分别使用改进的蚁群算法(ant colony algorithm, ACO)和 Q-learning 算法构建无人机的机动决策和冲突解脱算法, 可实现无人机在空战机动的同时避免相撞事故的发生. 最后以战损比为指标, 通过协同空战仿真证明了协同机动决策算法的有效性.无人作战飞机 (unmanned combat aerial vehicle, UCAV)作为未来空战的重要角色, 实现其空战过程 智能化是各军事强国研究的关键方向[1] . 美国作为航 空和人工智能技术最发达的国家, 在无人作战系统 的研究上同样走在世界最前沿. 早在 2016 年, 美国 的智能空战模拟系统便能以 100%的概率战胜退役 的空军上校[2] . 2017 年 3 月, 美国空军与洛·马公司 基于无人化的 F-16 对“忠诚僚机”概念关键性技术 展开验证, 包括开放式系统架构的软件集成环境和 无人机的自主任务规划功能, 旨在实现有人机与无 人机的协同作战[3-4] . 在美军的 2013 版《无人机系统 综合路线图》中, 更是计划到 2030 年前后实现无人 机编队的自主协同侦察与攻击功能. 因此, 我国同样 应当加大无人作战飞机自主决策技术的研究, 否则 难以在未来的空战场上取得优势. 无人机协同空战对抗既涉及空中的自主避撞, 又涉及战术的协同机动决策, 相对单机对抗和同型 机协同机动决策具有更大的技术难度和复杂度. 从 国内外的研究现状来看, 主要仍基于同机型的对抗 决策或协同机动决策研究, 对于异型机之间的协同 机动决策还仍有不足. NGUYEN 使用线性二阶模型 构建无人机编队模型, 使用一致性理论设计集群的 编队控制算法[5] , 但该研究主要关注动目标的协同追 踪问题, 对于更复杂的协同控制决策则并没有涉及. ZHEN 提出了一种智能自组织算法[6] , 该算法可实现 多无人机对抗的目标分配问题, 主要方法是将全局 问题分解为局部问题并进行优化计算. 但该研究主 要关注对地目标的协同攻击, 态势相对简单. 朱星宇 基于 Q-Learning 算法构建无人机的机动决策模型[7] , 而无人机之间的协同目标分配则是使用纳什均衡理 论, 由此实现多无人机空战机动决策. 研究中既考虑 了冲突解脱问题, 也考虑了态势问题, 具有较好的参 考价值. 魏潇龙基于改进蚁群算法研究了无人机的 自主冲突解脱问题[8] , 具有一定参考价值. 本文对异型机之间的空战协同决策问题展开研 究, 主要分析电子干扰无人机与空战无人机之间的 自主协同决策方法. 在探讨电子干扰伴随支援战术 机动方法基础上, 基于一致性理论设计了无人机之 间的编队控制方法, 使用蚁群算法实现我方无人机 之间的冲突解脱与战术机动, 使用改进的 Q-learning 算法设计敌对无人机的空战机动决策算法, 最后通 过空战仿真验证协同机动算法的有效性。