水下无人系统发展现状及关键技术
无人机、问空天公众号联合出品
《水下无人系统学报》杂志社提供版权

水下无人系统
近年来, 随着各国对战场低伤亡率的追求, UUS在海上战争中发挥的作用愈发显著。相比水下有人系统, UUS能够代替人执行“枯燥的、恶劣的和危险的”(dull, dirty, dangerous, 3D)任务, 具有机动性强、适应能力和生存能力高、无人员伤亡风险、制造和维护成本低等优点, 极大地扩展海军的作战能力, 被视为现代海军的“力量倍增器”。
1.1 国外研究现状
近年来, 世界各主要海军大国都加快了UUV的研究步伐, 并取得了重要进展。随着新材料、新能源、人工智能等技术的不断进步, 大深度、远航程、大载荷、自主回收成为UUV的发展趋势[2-3]。
1.1.1 美国
UUS是现代海军装备的重要组成部分, 是海军装备中新概念、新技术应用最为广泛的领域。美国历来对军事高科技保持着高度的敏感性, 并针对UUS制定了一系列的发展规划。
2000年, 美国海军综合考虑未来50年需求情况制定了一个中、远期发展规划, 即《无人水下航行器(UUV)总体规划》[4], 确定了未来UUV优先发展的4个特征能力: 1) 潜艇跟踪和追猎; 2) 海事侦察; 3) 水下搜索和调查; 4) 通信和导航援助。2004年, 美国海军对该规划进行了修订, 将UUV的任务最终调整为9项, 包括情报/监视/侦察、反水雷战、反潜战、检查与识别、海洋调查、通信/导航网络节点、负载投送、信息作战、时敏打击, 并提出了多UUV的概念[5]。之后, 美国海军未单独针对UUV再次发布规划, 而是由美国国防部对陆、海、空各类无人系统进行统筹规划。2007年, 美国国防部发布了《2007-2032年无人系统发展路线图》[6], 首次提出了地面、水下、空中统一的无人系统总体发展战略规划, 并表示未来25年美国将逐步建立一支完善而先进的无人作战部队。2009年、2011年、2013年美国国防部又先后对无人系统发展路线图进行了修订, 进一步强调了陆海空各无人系统的协同工作能力。2016年10月, 美国国防科学委员会发布了《下一代水下无人系统》报告, 对于美国国防部在下一个10年及以后如何维持水下优势提出了重要建议[7]。
由美国制定的系列发展规划可以看出, UUV正由单个系统朝向集群化趋势发展, 并与其他无人系统组网协同, 通过网络化无人平台的分布式态势感知和信息共享, 提高作战效能。目前, 美国已基本解决了单个UUV技术, 并正在向多UUV自主集群协同及海陆空集群协同发展。纵观美国UUS的发展, 体系化、集群化以及对新概念水下航行器的探索成为其显著特点。
1) UUV向体系化发展
美国海军空间和海战系统司令部(space and naval warfare systems command, SPAWAR)的先进无人搜索系统(advanced unmanned search system, AUSS), 最大潜深6 000 m, 最大速度5 kn, 一次充电可在深海进行10 h的搜索活动, 携带的水声通信设备可保证在6 000 m的水下向水面传送电荷耦合器件(charge coupled device, CCD)电视或侧视声呐数据。
美国在研发水下航行器的过程中, 还特别注重体系化发展。比如由伍兹霍尔海洋研究所设计的REMUS(remote environmental monitoring units)系列化水下航行器(见图1)。

(a) REMUS 100

(b) REMUS 600

(c) REMUS 6000
图1 REMUS系列化无人水下航行器
该系列具体包括REMUS 100、REMUS 600、REMUS 3000、REMUS 6000等型号, 可用于反水雷、航道侦察、港口警戒、地形测绘以及深水取样等任务, 目前有超过150艘REMUS水下航行器在北约国家中使用[8]。该系列水下航行器主要技术参数参见表1。
表1 REMUS系列化水下航行器主要技术参数

型号长度/m直径/m重量/kg最大工作深度/m续航力/h REMUS1001.320.1903710015(3 kn) REMUS6003.250.32424060070(5 kn) REMUS30003.700.3563353 00044(4 kn) REMUS60003.840.718646 00022(4 kn)
2) 新概念型水下航行器研究
美国新一代水下航行器“曼塔” (Manta)主要用于新概念及新技术的试验[9]。该航行器采用非常规的扁平外形设计, 悬挂在潜艇外部, 由潜艇释放自主执行任务(见图2)。Manta采用模块化结构设计, 可根据任务需要携载不同的传感器、武器及对抗设备, 执行情报搜集、侦察、监测、反水雷及反潜等多种任务, 完成任务后返回, 可重复使用。Manta的研制分2期进行, 近期排水量56.9 t, 长度15 m, 宽度5.8 m, 高度1.7 m; 远期排水量91.700 t, 航程2 000 km。

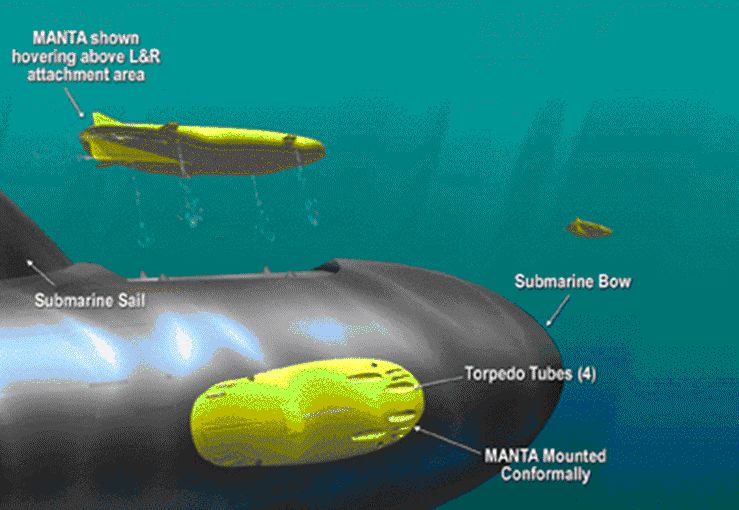
图2 美国“曼塔”水下航行器
新一代翼身融合水下滑翔机(X-Ray)由华盛顿大学应用物理实验室在美国海军研究办公室(office of naval research, ONR)资助研发[10]。该滑翔机创造性地采用翼身融合布局外形, 在为能源和有效载荷提供足够空间的同时, 还能实现高升阻比和大滑翔比(见图3)。X-Ray翼展6.1 m, 滑翔速度1~2 kn, 用于探测和跟踪浅水域的安静型潜艇。美国军方宣称X-Ray可以在指定区域内迅速部署并进行长达数月的运行, 监测范围超过1 000 km。Z-Ray是X-Ray的下一代产品, 具有更好的水动力性能, 其所有子系统在2010年3月进行了不同深度(最大深度300 m)的海洋试验, 试验结果十分理想。

(a) X-Ray

(b) Z-Ray
图3 翼身融合水下滑翔机
“深海浮沉载荷”(upward falling payloads, UFP)是由美国国防高级研究局(defense advanced research projects agency, DARPA)提出的一种水下预置无人系统[11]。该系统为在4 000 m深海布置的密封吊舱, 内置传感器、无人机、导弹等有效载荷, 潜伏期长达数年, 并在需要时远程遥控激活, 吊舱浮出水面, 释放有效载荷, 执行军事任务。UFP项目研究分为3个阶段: 概念测试阶段(2013年)、样机开发阶段(2014年)、演示验证阶段(2015年~2016年)。美海军计划于2017年进行UFP实战化部署。图4为UFP概念图。

图4 “深海沉浮载荷”概念图
3) UUS的集群化发展
随着各类水下航行器潜深、航程越来越大, 功能越来越多样化, UUS集群也取得了突飞猛进的发展。美国先后开发了多型海陆空联合作战网络体系, 利用UUV作为水下移动节点, 与其他固定/移动节点构成水下预警系统, 实现海洋数据采集、军事侦察及信息对抗等任务[12-14]。
美国海军自1998年起多次进行广域海网(Seaweb)的海底水声通信试验, 旨在提升未来海军作战能力。Seaweb是一种典型的海底水声传感器网络, 通过水声通信链路将固定节点、移动节点和网关节点连接成网(见图5)。美国在2001年的Seaweb2001演习中共布设了40个通信节点, 并利用潜艇“USS Dolphin”号在布网区域中现场进行有关网络性能的测试。

图5 海网示意图
可部署自主分布式系统(deployable autono- mous distributed system, DADS)是美国ONR和SPAWAR联合研发的未来海军濒海防雷反潜项目, 如图6所示。美国海军在2001年6月进行了DADS应用的舰队作战(FBE-I)试验。该试验系统由14个固定节点及数个移动节点组成, 包括2个传感器节点、2个浮标网关节点和10个遥控声呐中继节点, UUV作为移动节点加入网络, 网络服务器部署在岸基指挥中心。

图6 可部署自主分布式系统示意图
先进可布放系统(advanced deploymental sy- stem, ADS)由美国洛克希德-马丁公司设计和开发。每个ADS由4个互联的阵列安装模块组成, 每个安装模块可释放UUV, UUV沿预设路线展开体内的光缆和水听器阵列(见图7), 实现对潜艇和水面舰船的探测跟踪, 监测水雷布放活动。ADS之间还可以通过浮标相互通信, 形成更大的水下探测网络(见图8)。

图7 先进可布放系统布放展开过程示意图
水下持续监视网(persistent littoral underwat- er surveillance network, PLUSNet)于2006年开始研制, 它以巡航导弹核潜艇为母节点, 以核潜艇携带的UUV为移动子节点, 以水下潜标、浮标、水声探测阵为固定子节点, 构成一种潜布式海底固定加机动的水下网络, 如图9所示。

图8 ADS示意图

图9 水下持续监视网示意图
该系统可获取海洋环境信息、探测水下目标,为水下作战提供支撑, 已于2015年形成作战能力。美国电船公司基于巡航导弹核潜艇, 已经为PLUSNet开发了一种新型搭载系统进行隐蔽布放(见图10)。美国海军计划通过PLUSNet和ADS一起构成未来水下反潜网络[15]。

图10 美国电船公司开发的新型搭载系统PLUSNet
4) 其他新项目的研发
2015年, 美国加大了该领域的研究力度, 并发布了多个新项目的研发计划[2]。
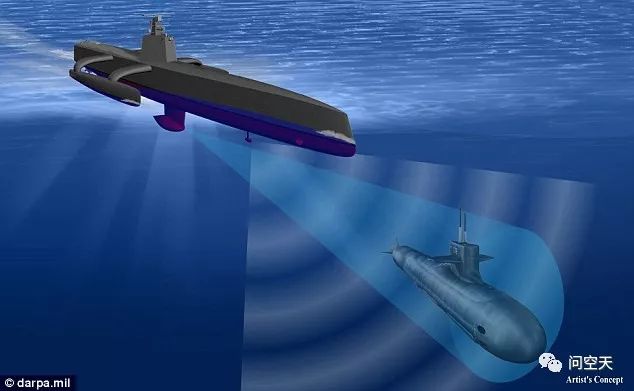
美国科学应用国际公司为DARPA研制的反潜战持续追踪无人艇(ASW continuous trail unma- nned vessel, ACTUV)项目, 旨在应对未来安静型柴电潜艇的威胁。该艇具有探测、跟踪、告警及规避功能, 能够进行无线和卫星等多种通信。艇体采用复合材料, 暴露在水面上的部分以及雷达反射截面较小, 具有很好的隐蔽性和浅海航行能力。航速达到27 kn, 作战半径达到3 000 km, 续航时间为3个月, 具有极佳的前沿部署能力及大范围反潜能力。
大直径无人水下航行器(large displacement unmanned undersea vehicle, LDUUV)具有扫雷、跟踪、情报侦察、自主工作、智能化攻击的能力, 可搭载各种类型的导弹、炸弹甚至核弹进行自主攻击; 既可独立使用, 也可在包括巡航导弹核潜艇、弗吉尼亚级攻击核潜艇和水面舰艇等多种平台上部署。该潜器计划2017年服役, 2020年具备完全作战能力。
2016年5月, 英国BAE公司开始为DARPA研发“深海导航定位系统”(POSYDON)项目。该系统由固定部署在海底的大量水声传感器组成, 水下航行器无需浮上水面寻求GPS定位, 也无需释放任何射频传输信号, 即可根据传感器的坐标推算出自身位置信息, 因此可最大限度地降低被探测的风险、成本和动力消耗。该项目研制时间暂定48个月, 分3个阶段进行。
1.1.2 俄罗斯
近年来, 俄罗斯大力发展UUV颠覆性技术。2015年11月, 俄披露了正在研发的一种水下高速自主航行器——“海洋多用途系统Status-6”, 该航行器可携带核弹头, 并可在沿海地区破坏敌方重要经济区域, 造成大范围的放射性污染。该航行器下潜深度约1 000 m, 速度可达56 kn, 续航约10 000 km。该航行器预计于2019年生产出原型机[2]。
1.1.3 欧洲
瑞典萨博(SAAB)公司一直致力于UUV的研究, 在2015年的英国防务展上, 该公司展出了该领域的多项研发成果。其中, AUV62-MR水雷探测系统具有水雷探测、反水雷、远程作业与高阶自主能力, 采用模块化设计, 可执行多种任务; 多功能水下航行器SUBROV则是一种最新型的远程操作UUV, 可被任何潜水艇运载发射, 适于21英寸标准级鱼雷发射管; 海黄蜂(Sea Wasp)是一种水下非常规爆炸处理装置, 采用模块化设计, 具有优异的适航性, 可执行多任务[2]。
英国南安普敦海洋中心研制的海洋调查与监视水下航行器AutoSub是一个大潜深、远航程的多用途水下航行器, 最大工作深度1 600 m, 航程500 km。
德国阿特拉斯电子公司研制的无人水下侦察航行器DeepC, 重2.4 t, 续航时间达60 h, 最大航程400 km, 巡航速度4 kn, 最大航速6 kn, 有效载荷300 kg, 最大潜深4 000 m。
1.2 国内发展现状
近年来, 我国针对单UUV技术的研究已取得突出进展, 中国科学院沈阳自动化研究所、哈尔滨工程大学、西北工业大学、天津大学、上海交通大学等单位都在该领域进行了大量研究。
中国科学院沈阳自动化研究所研制的系列化水下航行器, 包括“探索者”号航行器、“CR01”航行器、“CR02”航行器、“潜龙一号”、“潜龙二号”航行器等。其中“潜龙二号”在“潜龙一号”的基础上, 在机动性、避碰能力、快速3D地形地貌成图、浮力材料国产化方面均有较大提高, 为我国海底多金属硫化物调查和勘探提供高效、精细、综合的先进手段。
哈尔滨工程大学在“十二五”国家863计划支持下, 完成了300 kg级小型自主水下航行器(智水-Ⅳ)的研制, 在蓬莱海域实现了自主连续航行110 km和自主布放等多项功能演示, 最大潜深达1 000 m。
西北工业大学在“十一五”、“十二五”期间分别研制了“300 m航深、300 km航程”和“500 m航深、500 km航程”远程智能水下航行器, 突破了航行器低速横向平移与回旋、水下悬停矢量推进与操纵、新型稀土永磁推进电机等关键技术, 具有航路自主规划和安全布放回收能力。此外, 西北工业大学还研制了50 kg级便携式水下航行器, 航程50 km, 最大工作水深200 m, 具有安全可靠、便于操作、易于维护等优点, 可快速灵活扩展功能模块, 满足海洋环境探测和水下观测的需求。
天津大学研制的“海燕”号水下滑翔机, 采用变浮力滑翔、螺旋桨推进的混合运动模式, 在南海北部水深大于1500 m海域不间断工作30天, 最大航程超过1 000 km, 创造了中国水下滑翔机无故障航程最远、时间最长、剖面运动最多、工作深度最大等诸多纪录。
目前, 国内的研究主要集中于单UUV技术阶段, 在航行器集群协同方面开展了一些前期研究, 同时需具备航程数千公里、最大工作水深数千米指标的UUV。此外, 还应重视产品的体系化发展, 研发远离岸基、自主远程隐蔽航渡、自行展开军事对抗的关键装备, 加强对新概念航行器的探索。
UUS是多学科交叉、融合的综合系统, 蕴涵着大量的基础科学和前沿技术, 是一个庞大的系统工程。围绕解决UUS“自主性、互操作、数据链、多平台协同”等核心问题, 需要重点突破以下共性关键技术。
2.1 自主航行技术
为了确保UUS能够在复杂海洋环境中自主协同地完成各项任务, 必须解决环境自适应、自主对接与回收、编队协同控制、协同导航与定位等技术问题。
1) 环境自适应技术
UUV执行任务时, 能够根据海洋环境、任务需求、运动约束、通信约束等多时空约束, 合理规划出最优的航迹或者航路点, 以节约能源、规避危险区域等。航行过程中, 由于海洋环境的变化, UUV根据实时测量信息, 需要避开在其航行路径上的障碍物或者危险区域, 因此UUV还要求有自主避障的能力, 以适应环境的变化。
此外, 一些任务中UUV要在海底隐蔽航行, 为了保证UUV的安全性, 要求能够与海底保持一定的高度航行, 因此, 在海底起伏的情形下, UUV要能够根据海底地形自主调节距底高度。
2) 自主对接与回收技术
为了实现UUV能源补给、数据传输的功能, 必须解决UUV与水下基站的自主对接与回收问题。目前, 美国已经实现了在自主海洋采集网络(autonomous ocean sampling network, AOSN)中通过固定的水下回收器收集UUV的数据并对其补充能量。国内中科院沈阳自动化研究所和哈尔滨工程大学已经进行了一些水面舰船和潜艇通过释放回收器实现UUV回收的研究, 西北工业大学则开展了潜艇发射管回收UUV时的流体动力和微速控制方面的研究[16-17]。
为此, 围绕UUV在复杂海洋环境下长时间作业的需求, 应重点解决水下自主对接非定常力学特性分析、水下自主对接过程微速操纵性分析、基于声学/光学信息融合的水下对接目标定位与定向等关键技术。
3) 编队协同控制技术
多UUV协作过程中, 需能够自主进行任务分配。巡航过程中, UUV通过与其他平台的信息交互, 使多个平台之间保持一定的距离航行, 并随时共享相互间的探测信息, 当UUV探测到环境信息变化需要改变队形时, UUV能够通过相互之间的协调来自主完成队形变换。当对目标进行协同攻击时, UUV之间能够根据指定的方式对目标实施打击。图11为UUV编队协同控制示意图。
4) 协同导航与定位技术
高精度的导航定位是多UUV系统完成任务的基础。通过UUV间导航信息的共享, 即多UUV间的协同导航, 在提高系统整体导航定位精度的同时, 既可降低导航定位成本, 还可摆脱基阵/母船的束缚, 使用区域灵活。目前, 协同导航与定位主要有领航跟随式和分布式2种。领航跟随式中, 领航UUV配置高精度导航传感器, 跟随UUV配置低精度导航传感器, 领航UUV的数量一般2~4个, 理论上跟随UUV数量不受限制; 跟随UUV一般需与领航者通信, 并且领航UUV间需要具备配合能力。分布式中, 每个UUV具有相同的导航传感器配置与同等地位, 一般要求UUV与多个邻居通信, 由于目前世界先进的美国伍兹霍尔海洋研究所(WHOI)研制的水声通信系统Modem较可靠的通信率也只有32 Bytes/10 s, 故适合于UUV数量较少的场合。
2.2 水下数据链通信技术
为了实现UUV多平台间的数据共享, 必须解决水下远程高速动态通信、水下网络与空中网络互联等技术问题。
1) 水下远程高速动态通信技术
在执行大范围、远航程任务时, 航行器之间以及航行器与母平台之间需要进行远程高速动态通信, 以实现信息传输与共享。为了实现水下远程高速动态通信, 重点需要突破深海声信道远程通信技术、远程低误码率指令信息传输技术以及信息传输抗截获技术等。
2) 水下网络与空中网络互联技术
UUV主要以声学通信为主, 然而水声通信存在着水声信道时域和空域不断变化、多途效应扩展严重、具有频率选择性信道衰落、可用频带资源有限等限制, 使得UUV的通信距离和带宽受到限制, 并且误码率高。为了实现水下网络与空中网络的互联, 重点需要突破基于移动节点的水声组网通信技术、水下中继水声通信技术、水下网络-浮标-卫星中继通信技术等。通过多个移动节点之间的相互通信, 构建水下移动声学网络, 将水面浮标作为中继, UUV可以与卫星实现通信, 从而实现海空天三位一体协同工作。


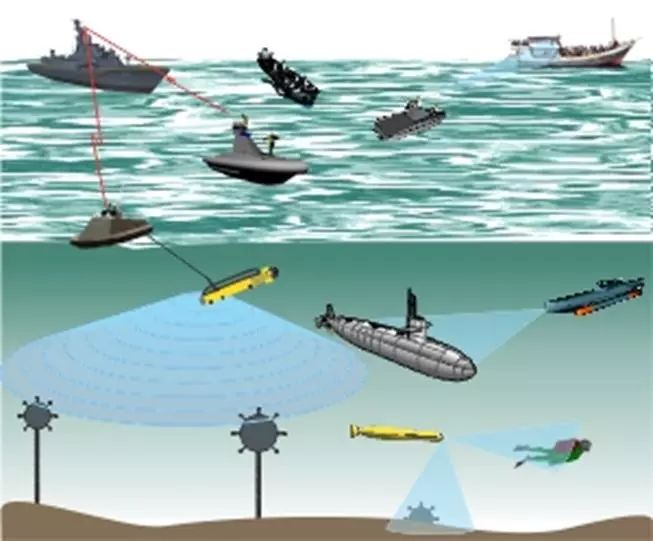
图11 水下航行器编队协同控制
海洋是我国经济可持续发展的重要战略空间, 更是国家安全的重要屏障。UUS作为海洋防卫的重要装备, 是我国现代海军崛起、建设蓝水海军的重要组成部分。
当今各军事大国都在加紧各类UUS的研制和开发, 美国在该领域的研究更在体系化、集群化以及对新概念水下航行器的探索等方面凸现其技术优势。相比而言, 我国尚需在系统的集群协同、超远航程与超大潜深、自主隐蔽作战等方面加大投入和研发。
鉴于UUS的发展趋势, 未来研究方向及重点应基于以下几方面: 1) 仿生技术、人工智能技术将在UUS中扮演越来越重要的角色, 也是我国实现弯道超车的技术突破点; 2) 应尽快召集国内相关技术优势单位, 在充分调研的基础上, 制定我国UUS的发展路线图, 指导相关技术研究; 3) 将UUV与无人水面船、无人地面车辆、无人机等无人系统统筹考虑, 同时开展多种异构无人平台的联合协同作战研究。
本文作者为西北工业大学航海学院、无人水下运载技术工信部重点实验室潘光、宋保维、 黄桥高、施瑶。
《水下无人系统学报》是由中国船舶重工集团公司主管, 第七〇五研究所主办的综合性学术期刊。以报道国内外水下无人装备科学与技术领域的最新科研成果、相关交叉学科领域基础理论与应用技术, 涵盖军民两用技术, 繁荣学术交流, 服务工程实践, 促进行业发展为办刊宗旨。该刊前身《鱼雷技术》, 创刊于1993年, 2017年正式更名为《水下无人系统学报》。现设栏目: 综述评论、基础研究、工程应用、研究简报等。该刊为国内多家主流数据库收录, 现为中国科技论文统计源期刊(中国科技核心期刊)。读者对象为从事水下无人装备科学与技术领域研究、设计、生产和使用的广大科研技术及管理人员、领导机关、部队、大专院校师生以及热爱、关注水下无人装备技术的广大读者。现有读者主要分布于北美、澳洲、西欧、亚洲等9个国家和地区。该刊主要刊登水下无人装备科学与技术领域的基础研究、应用研究和工程技术方面的论文。主要包括: 水中兵器、无人水下航行器(UUV)、无人水面艇(USV)、水下预置武器系统、水下无人作业装备、水下无人(能源)补给站/系统、水下无人平台和水下监/观测网, 等。
本公众号现已与多家航空航天及防务期刊建立了文献共享与推荐关系,陕西宇航学会专家组建立了论文义务辅导团队,可将优秀论文推荐至合作期刊,欢迎作者直接通过陕西省宇航学会投稿:astronautic@yeah.net。
编审:砒霜大毒 垃圾上的驴
参考文献
[1] 熊思齐, 姚直象, 杨新友, 等. 无人水下航行器发展现状及若干关键技术探讨[J]. 声学技术, 2015, 34(2): 262-264. Xiong Si-qi, Yao Zhi-xiang, Yang Xin-you. The Investigation of UUV′s Development Status and Key Techniques[J]. Technical Acoustics, 2015, 34(2): 262-264.
[2] 李经. 水下无人作战系统装备现状及发展趋势[J]. 舰船科学技术, 2017, 39(1): 1-5. Li Jing. Existence and Development Trend of Navy Auto- nomous Underwater Combat System[J]. Ship Science and Technology, 2017, 39(1): 1-5.
[3] 钱东, 唐献平, 赵江. UUV技术发展与系统设计综述[J]. 鱼雷技术, 2014, 22(6): 401-415. Qian Dong, Tang Xian-ping, Zhao Jiang. Overview of Te- chnology Development and System Design of UUVs[J]. Torpedo Technology, 2014, 22(6): 401-415.
[4] Department of the Navy, United States of America. The Navy Unmanned Undersea Vehicle(UUV) Master Plan[R]. U.S.: Department of the Navy, 2000.
[5] Department of the Navy, Department of the Navy. The Navy Unmanned Undersea Vehicle(UUV) Master Plan[R]. U.S.: Department of the Navy, 2004.
[6] Department of Defense. Unmanned Systems Roadmap 2007-2032[R]. U.S.: DoD, 2007.
[7] Office of the Under Secretary of Defense for Acquisition, Technology, and Logistics. Next-Generation Unmanned Undersea Systems[R]. U.S.: USD, 2016.
[8] Daniel E. Sgarioto. Steady State Trim and Open Loop Stability Analysis for the REMUS Autonomous Underw- ater Vehicle[C]//IEEE International Conference on Control and Automation. Christchurch, New Zealand: IEEE, 2009.
[9] 郭魁俊. 自主式水下航行器水动力系数数值研究[D]. 哈尔滨: 哈尔滨工业大学, 2009.
[10] ONR. Liberdade XRay Advanced Underwater Gilder [EB/OL]. [2006-04-19] https://commons. wikimedia.org/ wiki/File:Liberdade_XRay_underwater_glider.jpg.
[11] DARPA“深海浮沉有效载荷”(UFP)项目发展概况[EB/OL].[2016-06-14]. http://www. 360doc. com/content/ 16/0614/22/33578855_567823318.shtml.
[12] 王汉刚, 刘智, 张义农, 等. 水下作战的发展分析与启示[J]. 舰船科学技术, 2015, 37(4): 241-245. Wang Han-gang, Liu Zhi, Zhang Yi-nong, et al. The Ana- lysis and Elicitation of Development on Undersea Warfare[J]. Ship Science and Technology, 2015, 37(4): 241- 245.
[13] 牛轶峰, 沈林成, 戴斌, 等. 无人作战系统发展[J].国防科技, 2009, 30(5): 1–11.Niu Yi-feng, Shen Lin-cheng, Dai Bin, et al. A Survey of Unmanned Combat System Development[J]. National De- fense Science and Technology, 2009, 30(5): 1-11.
[14] 李耐和. 外军构建水下作战网络[J]. 现代军事, 2007 (12): 46-50.
[15] 陈强, 孙嵘. 支持美国海军作战的无人系统[M]. 北京: 海潮出版社, 2015.
[16] 张伟, 张明臣, 郭毅, 等. 一种回收过程中UUV对运动母船的跟踪方法[J]. 哈尔滨工程大学学报, 2015, 36(6): 795-800. Zhang Wei, Zhang Ming-chen, Guo Yi, et al. An Approach for UUV Tracking the Moving Mothership in the Reco- very Stage[J]. Journal of Harbin Engineering University, 2015, 36(6): 795-800.
[17] 潘光, 杨智栋, 杜晓旭. UUV水下带缆回收纵向运动研究[J]. 西北工业大学学报, 2011, 29(2): 245-250.Pan Guang, Yang Zhi-dong, Du Xiao-xu. Longitudinal Motion Research on UUV Underwater Recovery with a Deployable Tether[J]. Journal of Northwestern Polytechnical University, 2011, 29(2): 245-250.


长按识别图中二维码关注我们!



