李克强:智能车辆运动控制研究综述

厚势按:本文为清华大学汽车工程系郭景华博士后、李克强教授、罗禹贡博士发表在 2016 年第 2 期《汽车安全与节能学报》上发表的关于自动驾驶汽车运动控制的综述论文。
在昨天推送的文章主要讲述自动驾驶汽车生成运动轨迹的算法,今天推送的文章将介绍轨迹生成之后,如何对轨迹进行跟踪控制的算法,两者具有逻辑上的连贯性。
「轨迹跟踪控制」是指以车辆姿态作为控制输入,实际轨迹作为状态变量,期望轨迹(通过算法生成)作为参考状态,跟踪车辆轨迹,规划模块输出的行驶轨迹,包括位置、航向和速度。
智能车辆是车辆工程领域的研究前沿和未来汽车工业发展的新方向,其智能化集中体现在智能安全驾驶方面。严峻的交通安全、能源浪费和环境污染等问题,使得智能车辆作为智能交通系统的一个重要组成部分日益受到重视。
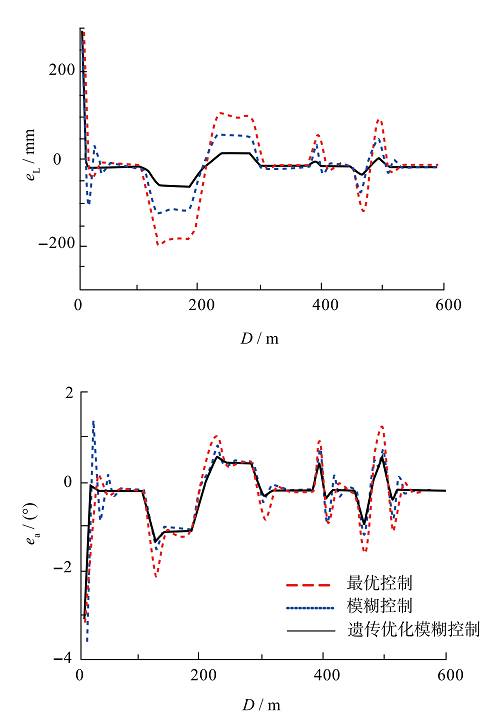
横向控制主要研究智能车辆的路径跟踪能力,即如何控制车辆沿规划的路径行驶,并保证车辆的行驶安全性、平稳性与乘坐舒适性;
纵向控制主要研究智能车辆的速度跟踪能力,控制车辆按照预定的速度巡航或与前方动态目标保持一定的距离。
1. 智能车辆横向运动控制

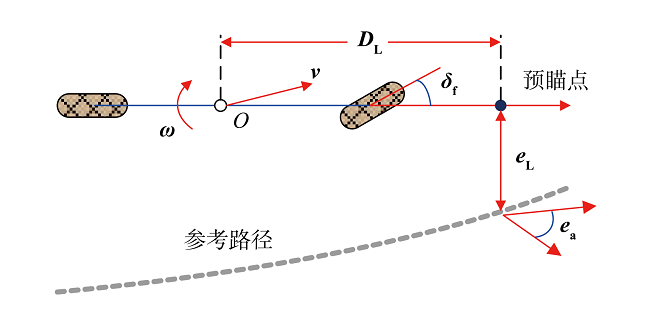

1.2 横向运动控制方法
国内外研究学者分别针对基于非预瞄及预瞄横向动力学系统的控制问题,采用现代控制及非线性控制等理论和方法来处理,现对当前横向控制方法进行分析。
2. 智能车辆纵向运动控制
纵向运动控制指通过某种控制策略调节车辆的纵向运动状态,实现车辆纵向距离保持或自动加减速的功能。按照实现方式可分为直接式结构控制和分层式结构控制,现对这2种纵向控制方法进行分析。
2.1 基于直接式结构的纵向控制
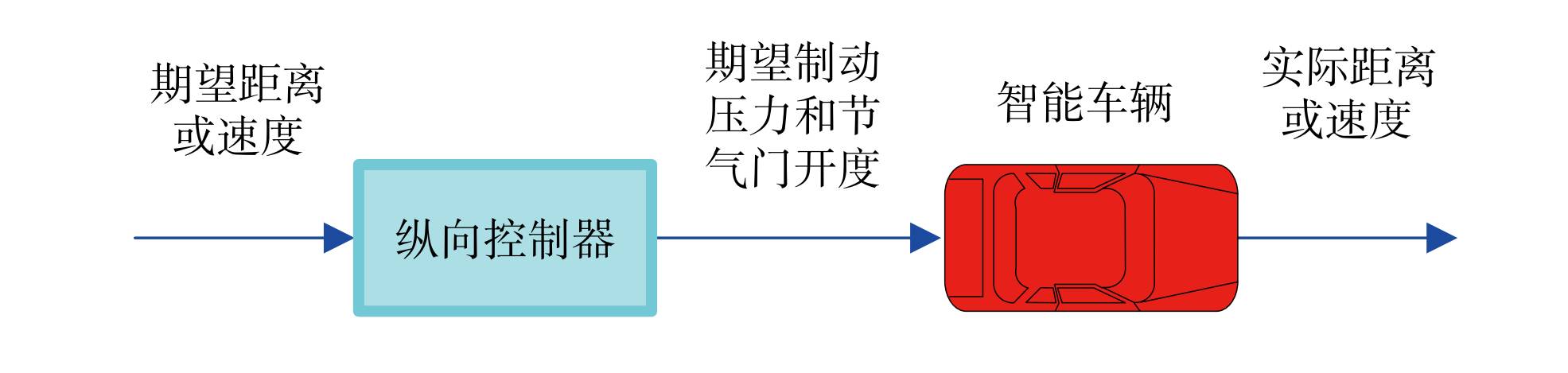
图 4 直接式控制结构
直接式控制结构由一个纵向控制器给出所有子系统的控制输入,如图 4 所示。
2.2 基于分层式结构的纵向控制

图 5 直接式结构的纵向控制
3. 智能车辆横纵向综合控制
针对智能车辆横纵向动力学间的耦合、关联特性,部分学者尝试采用横纵向运动综合控制。对于智能车辆纵横向综合控制的研究工作,目前大多局限于理论分析。
从控制结构上讲,智能车辆横纵向运动综合控制分为分解式控制和集中式控制。
3.1 分解式协调控制
3.2 集中式协调控制
4. 运动控制技术发展趋势
综上所述,智能车辆的运动控制技术取得了令人瞩目的进展。然而,由于车辆纵横向动力学机理复杂及多性能目标相互耦合,且先进通信技术在智能车辆上的广泛应用,使得其运动控制技术产生了新的挑战。因此,智能车辆运动控制研究中还存在许多重要且尚未解决的问题需要我们去探索和认知。
随机不确定性及时滞工况下智能车辆纵横向运动协同控制方法
如何掌握智能车辆高度网络化和集成化固有的随机不确定及时滞等特征对车辆运动控制系统的作用规律;
如何构建随机不确定性及时滞干扰下智能车辆纵横向协同控制方法,实现车辆纵横向动力学的实时动态协调。
结论
智能车辆的研究和发展将给汽车工业带来革命性变化。运动控制技术作为智能车辆的关键环节,仍将是研究热点。
本文介绍了智能车辆横向、纵向及横纵向综合运动控制的研究现状,提出智能车辆运动控制未来发展的三大方向,分别为:
随机不确定性及时滞工况下智能车辆纵横向运动协同控制;
智能车辆运动控制的多性能目标全局优化技术;
车联网环境下智能车辆协作式控制理论和方法。
参考文献

作者简介
编辑整理:厚势分析师拉里佩
转载请注明来自厚势和厚势公号:iHoushi
-END-
厚势往期推送精选


文章精选
企业家
智能驾驶
苹果公司造车?库克又不傻!iPhone的挣钱效率比造车高多了!
新能源汽车
项目和评论
这些大神从Google出走,创办了五家(命运各异的)无人车公司
厚
势
汽
车
为您对接资本和产业
新能源汽车 自动驾驶 车联网
联系邮箱
bp@ihoushi.com

点击阅读原文,查看「同济汽车余卓平教授:无人车运动规划算法综述 」

