
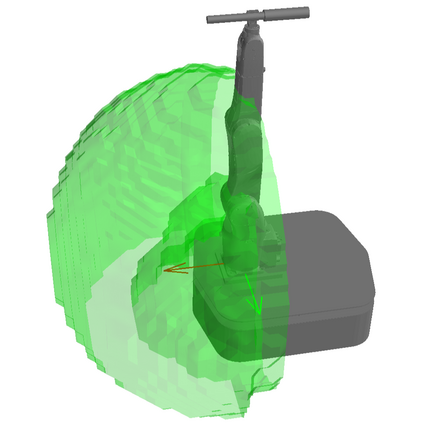
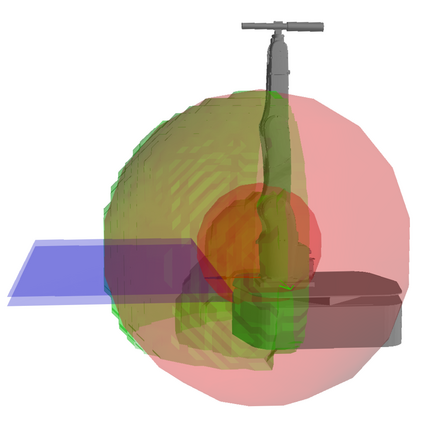
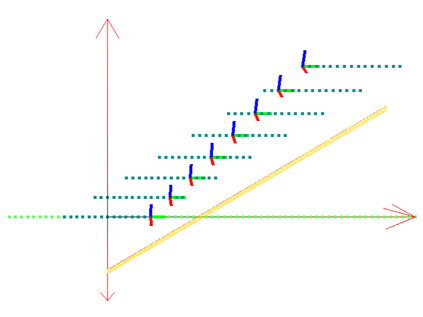
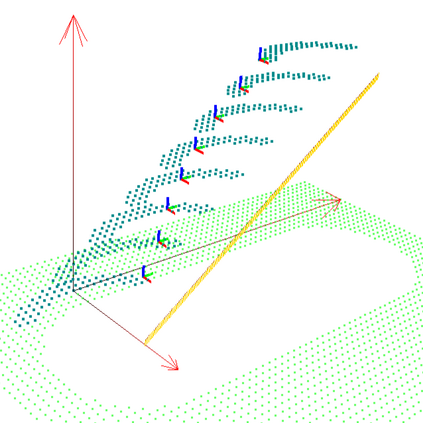
Mobile manipulators have been employed in many applications which are usually performed by multiple fixed-base robots or a large-size system, thanks to the mobility of the mobile base. However, the mobile base also brings redundancies to the system, which makes trajectory planning more challenging. One class of problems recently arising from mobile 3D printing is the trajectory-continuous tasks, in which the end-effector is required to follow a designed continuous trajectory (time-parametrized path) in task space. This paper formulates and solves the optimal trajectory planning problem for mobile manipulators under end-effector trajectory continuity constraint, which allows considerations of other constraints and trajectory optimization. To demonstrate our method, a discrete optimal trajectory planning algorithm is proposed to solve mobile 3D printing tasks in multiple experiments.
翻译:暂无翻译



相关内容

Source: Apple - iOS 8

