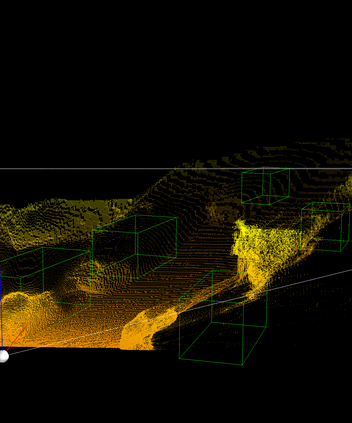
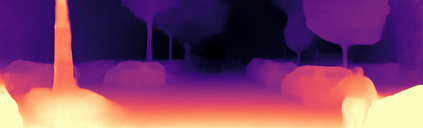
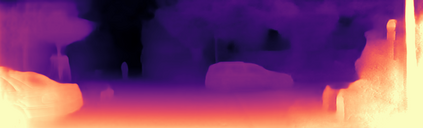
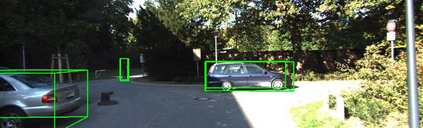
3D object detection from a single image without LiDAR is a challenging task due to the lack of accurate depth information. Conventional 2D convolutions are unsuitable for this task because they fail to capture local object and its scale information, which are vital for 3D object detection. To better represent 3D structure, prior arts typically transform depth maps estimated from 2D images into a pseudo-LiDAR representation, and then apply existing 3D point-cloud based object detectors. However, their results depend heavily on the accuracy of the estimated depth maps, resulting in suboptimal performance. In this work, instead of using pseudo-LiDAR representation, we improve the fundamental 2D fully convolutions by proposing a new local convolutional network (LCN), termed Depth-guided Dynamic-Depthwise-Dilated LCN (D$^4$LCN), where the filters and their receptive fields can be automatically learned from image-based depth maps, making different pixels of different images have different filters. D$^4$LCN overcomes the limitation of conventional 2D convolutions and narrows the gap between image representation and 3D point cloud representation. Extensive experiments show that D$^4$LCN outperforms existing works by large margins. For example, the relative improvement of D$^4$LCN against the state-of-the-art on KITTI is 9.1\% in the moderate setting. The code is available at https://github.com/dingmyu/D4LCN.
翻译:由于缺少准确深度信息,从一个没有LiDAR的图像中检测3D对象是一项具有挑战性的任务。 常规 2D 组合不适合这项任务, 因为它们不能捕捉本地天体及其规模信息, 而这些天体和规模信息对于 3D 天体探测至关重要。 为了更好地代表 3D 结构, 先行艺术通常会将从 2D 图像估计的深度地图转换成假LiDAR 代表器, 然后应用现有的 3D 点球形天体探测器。 然而, 其结果在很大程度上取决于估计深度地图的准确性, 从而产生低于最佳的性能。 在这项工作中, 我们没有使用假的 LDAR 代表器, 而是用新的本地天体图网络(LCN ) 来改进基本 2D$ 基本 2D 和 范围信息(NCN $ ), 即深度动态D- DR 代表器(D$) 和 3DR 代表器(DR) 之间的现有大比例值, 显示现有D- 4D- 平面图像代表器(Dx ) 显示现有D- Ralmaisal 的大型图像代表。