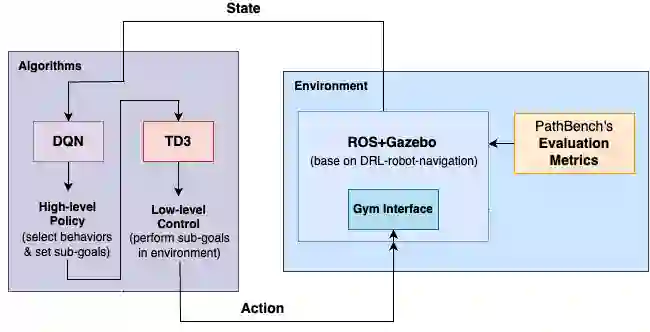
This paper presents a hierarchical path-planning and control framework that combines a high-level Deep Q-Network (DQN) for discrete sub-goal selection with a low-level Twin Delayed Deep Deterministic Policy Gradient (TD3) controller for continuous actuation. The high-level module selects behaviors and sub-goals; the low-level module executes smooth velocity commands. We design a practical reward shaping scheme (direction, distance, obstacle avoidance, action smoothness, collision penalty, time penalty, and progress), together with a LiDAR-based safety gate that prevents unsafe motions. The system is implemented in ROS + Gazebo (TurtleBot3) and evaluated with PathBench metrics, including success rate, collision rate, path efficiency, and re-planning efficiency, in dynamic and partially observable environments. Experiments show improved success rate and sample efficiency over single-algorithm baselines (DQN or TD3 alone) and rule-based planners, with better generalization to unseen obstacle configurations and reduced abrupt control changes. Code and evaluation scripts are available at the project repository.
翻译:本文提出了一种分层路径规划与控制框架,该框架将用于离散子目标选择的高层深度Q网络(DQN)与用于连续执行的低层双延迟深度确定性策略梯度(TD3)控制器相结合。高层模块负责选择行为与子目标;低层模块执行平滑的速度指令。我们设计了一套实用的奖励塑造方案(包括方向、距离、避障、动作平滑度、碰撞惩罚、时间惩罚及进度奖励),并结合基于激光雷达的安全门机制以防止不安全运动。该系统在ROS + Gazebo(TurtleBot3)平台上实现,并在动态及部分可观测环境中使用PathBench指标进行评估,包括成功率、碰撞率、路径效率与重规划效率。实验结果表明,相较于单一算法基线(仅使用DQN或TD3)及基于规则的规划器,本方法在成功率与样本效率上均有提升,对未见过的障碍物配置具有更好的泛化能力,并减少了突变的控制指令。项目仓库中提供了代码与评估脚本。