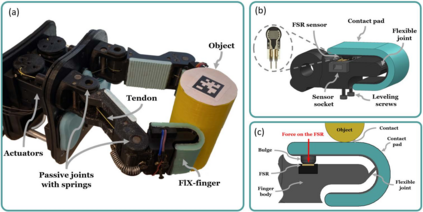
Unlike traditional robotic hands, underactuated compliant hands are challenging to model due to inherent uncertainties. Consequently, pose estimation of a grasped object is usually performed based on visual perception. However, visual perception of the hand and object can be limited in occluded or partly-occluded environments. In this paper, we aim to explore the use of haptics, i.e., kinesthetic and tactile sensing, for pose estimation and in-hand manipulation with underactuated hands. Such haptic approach would mitigate occluded environments where line-of-sight is not always available. We put an emphasis on identifying the feature state representation of the system that does not include vision and can be obtained with simple and low-cost hardware. For tactile sensing, therefore, we propose a low-cost and flexible sensor that is mostly 3D printed along with the finger-tip and can provide implicit contact information. Taking a two-finger underactuated hand as a test-case, we analyze the contribution of kinesthetic and tactile features along with various regression models to the accuracy of the predictions. Furthermore, we propose a Model Predictive Control (MPC) approach which utilizes the pose estimation to manipulate objects to desired states solely based on haptics. We have conducted a series of experiments that validate the ability to estimate poses of various objects with different geometry, stiffness and texture, and show manipulation to goals in the workspace with relatively high accuracy.
翻译:与传统的机器人手不同,不触动的合规手与传统的机器人手不同,由于内在的不确定性,对模型具有挑战性。因此,对掌握的物体的估计通常是根据视觉感知来进行的。然而,对手和物体的视觉感知在隐蔽或部分隐蔽的环境中是有限的。因此,在本文件中,我们打算探索使用机械化,即运动美观和触摸感,以提出估计和手动不活跃的手来进行触摸。这种巧妙的方法将减少隐蔽的环境,而这种环境并不总能提供直线观察。我们强调确定系统不包括视觉的特征状态,而能够以简单和低成本硬件获得的特征。因此,我们建议使用一个成本低廉和灵活的传感器,主要是与手指触摸和触摸感测仪一起印刷3D,可以提供隐性的联系信息。用两根未精细的手作为测试案例,我们分析感动和触摸特征的贡献,以及各种回归模型对预测目标的准确性。我们强调系统特征的特征的特征,其中不包括视觉,并且可以用简单和低成本硬件获得的硬件。我们提议一个成本控制模型的模型的模型,用来评估。我们用一种对各种方向的模型进行精确的模型的模型的模型的模型的模型的模型,然后用一种方法来进行精确的模型进行精确的实验。