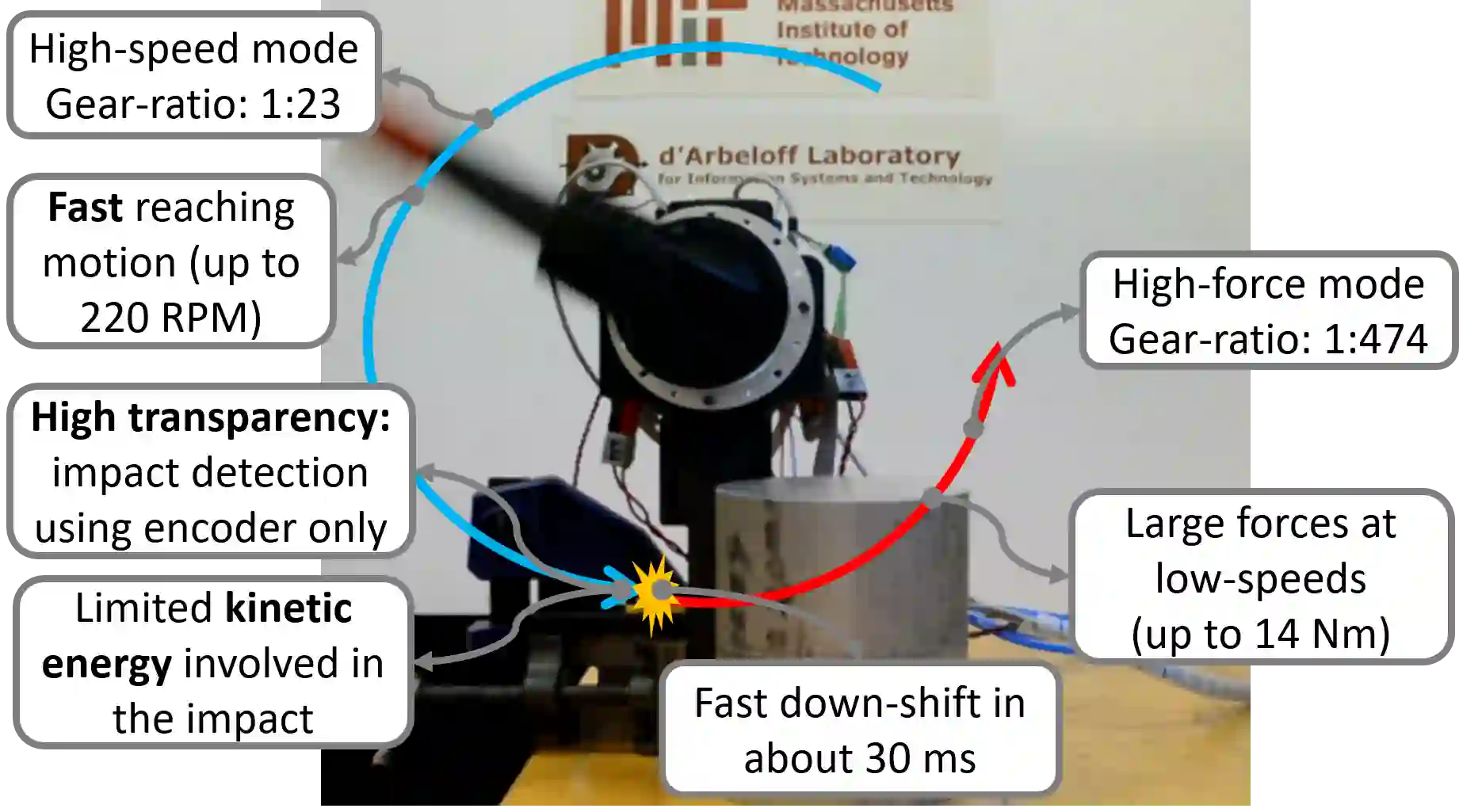
Vehicle power-trains use a variable transmission (multiple gear-ratios) to minimize motor size and maximize efficiency while meeting a wide-range of operating points. Robots could similarly benefit from variable transmission to save weight and improve energy efficiency; leading to potentially groundbreaking improvements for mobile and wearable robotic systems. However, variable transmissions in a robotic context leads to new challenges regarding the gear-shifting methodology: 1) order-of-magnitude variations of reduction ratios are desired, and 2) contact situations during manipulation/locomotion tasks lead to impulsive behavior at the moment when gear-shifting is required. This paper present an actuator with a gear-shifting methodology that can seamlessly change between two very different reduction ratios during dynamic contact situations. Experimental results demonstrate the ability to execute a gear-shift from a 1:23 reduction to a 1:474 reduction in less than 30ms during contact with a rigid object.
翻译:机动车动力阵列使用一种可变传输(多重齿轮),以尽量减少发动机尺寸和最大限度地提高效率,同时满足一系列广泛的操作点。机器人也可以同样从可变传输中受益,以节省重量和提高能效;导致移动和可磨损机器人系统的潜在突破性改进。然而,机器人环境下的可变传输导致在轮用方法方面出现新的挑战:1) 降低比率的幅度变化是理想的;2) 操作/移动任务期间的接触情形导致在需要轮用时的冲动行为。本文展示了一种动动因转换方法,在动态接触情况下可以无缝地改变两种截然不同的降压率。实验结果显示,在与僵硬物体接触期间,能够执行轮用式,从1:23降至1:474,降幅不到30米。