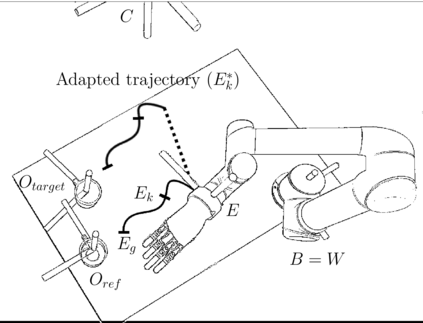
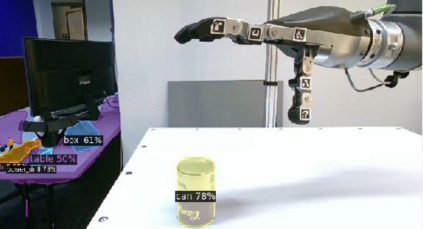
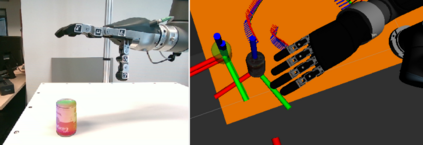
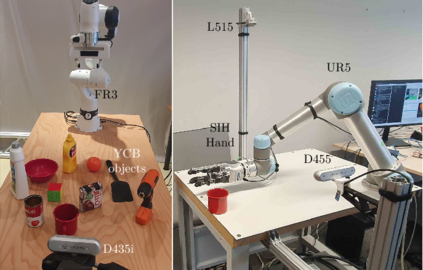
Robotic grasping is still a partially solved, multidisciplinary problem where data-driven techniques play an increasing role. The sparse nature of rewards make the automatic generation of grasping datasets challenging, especially for unconventional morphologies or highly actuated end-effectors. Most approaches for obtaining large-scale datasets rely on numerous human-provided demonstrations or heavily engineered solutions that do not scale well. Recent advances in Quality-Diversity (QD) methods have investigated how to learn object grasping at a specific pose with different robot morphologies. The present work introduces a pipeline for adapting QD-generated trajectories to new object poses. Using an RGB-D data stream, the vision pipeline first detects the targeted object, predicts its 6-DOF pose, and finally tracks it. An automatically generated reach-and-grasp trajectory can then be adapted by projecting it relatively to the object frame. Hundreds of trajectories have been deployed into the real world on several objects and with different robotic setups: a Franka Research 3 with a parallel gripper and a UR5 with a dexterous SIH Schunk hand. The transfer ratio obtained when applying transformation to the object pose matches the one obtained when the object pose matches the simulation, demonstrating the efficiency of the proposed approach.
翻译:暂无翻译