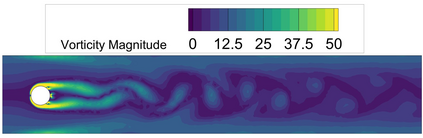
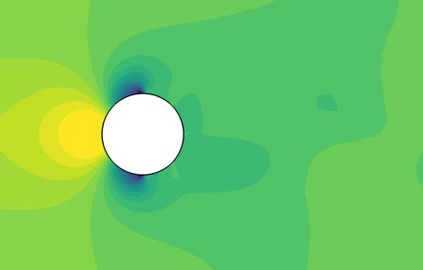
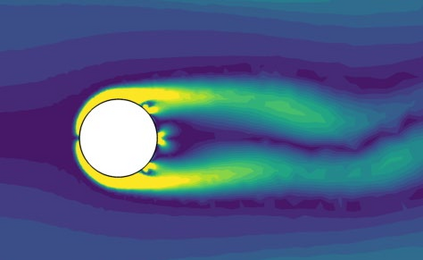
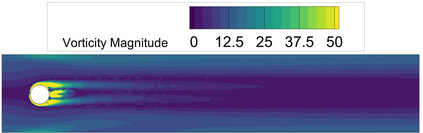
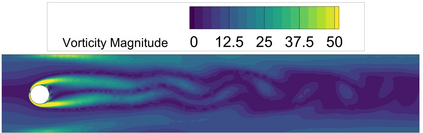
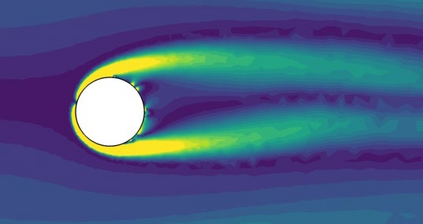
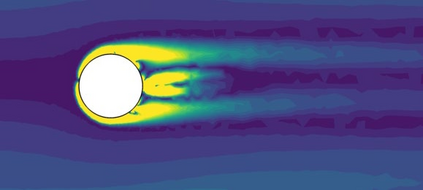
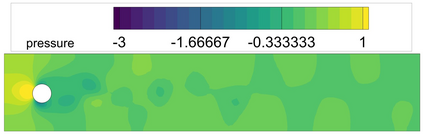
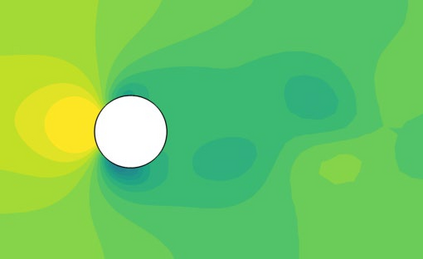
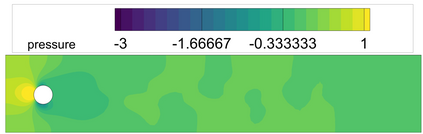
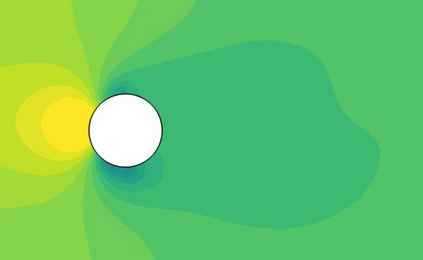
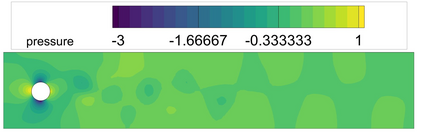
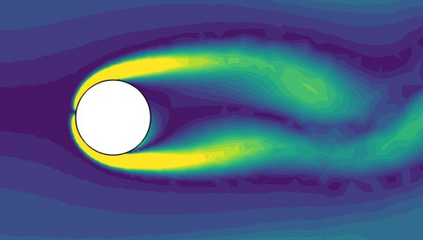
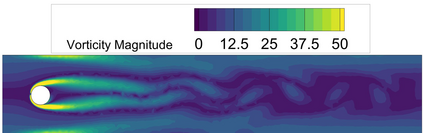
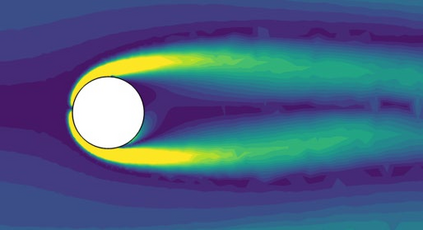
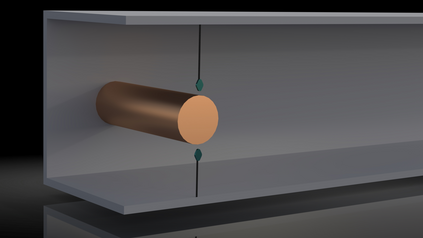
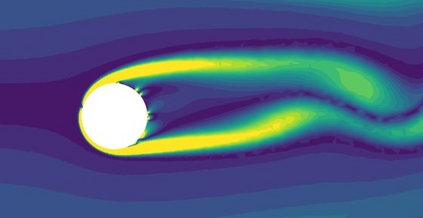
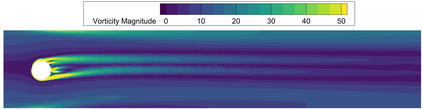
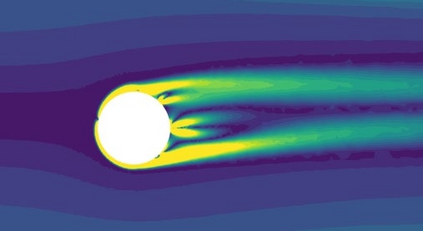
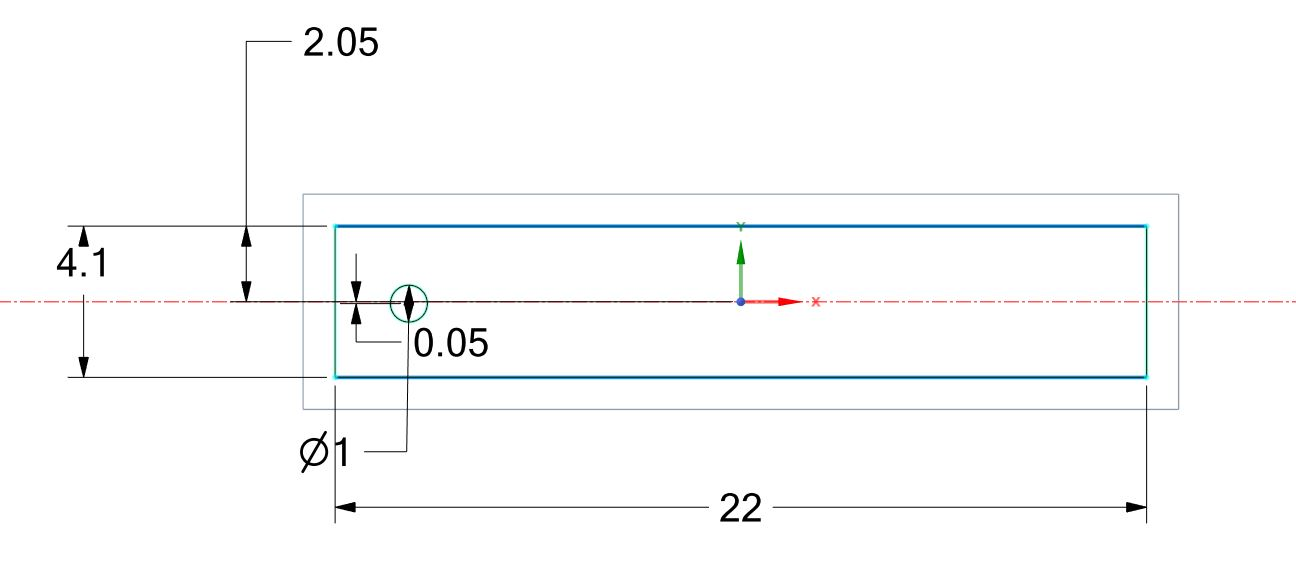
The real power of artificial intelligence appears in reinforcement learning, which is computationally and physically more sophisticated due to its dynamic nature. Rotation and injection are some of the proven ways in active flow control for drag reduction on blunt bodies. In this paper, rotation will be added to the cylinder alongside the deep reinforcement learning (DRL) algorithm, which uses multiple controlled jets to reach the maximum possible drag suppression. Characteristics of the DRL code, including controlling parameters, their limitations, and optimization of the DRL network for use with rotation will be presented. This work will focus on optimizing the number and positions of the jets, the sensors location, and the maximum allowed flow rate to jets in the form of the maximum allowed flow rate of each actuation and the total number of them per episode. It is found that combining the rotation and DRL is promising since it suppresses the vortex shedding, stabilizes the Karman vortex street, and reduces the drag coefficient by up to 49.75%. Also, it will be shown that having more sensors at more locations is not always a good choice and the sensor number and location should be determined based on the need of the user and corresponding configuration. Also, allowing the agent to have access to higher flow rates, mostly reduces the performance, except when the cylinder rotates. In all cases, the agent can keep the lift coefficient at a value near zero, or stabilize it at a smaller number.
翻译:暂无翻译