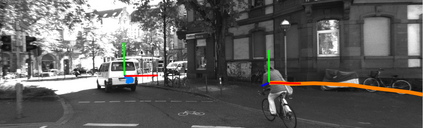
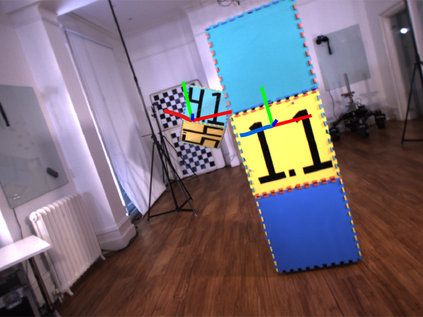
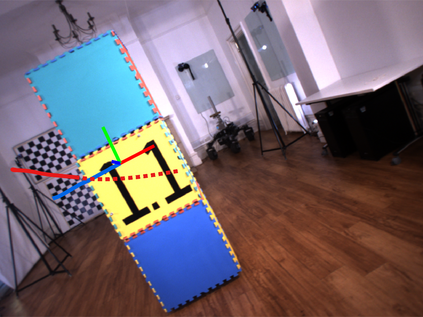
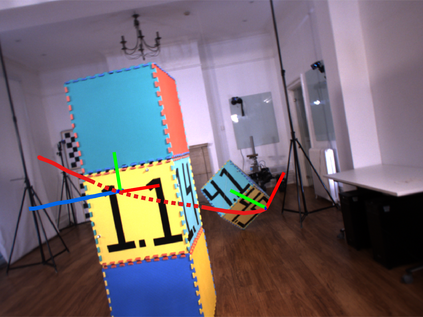
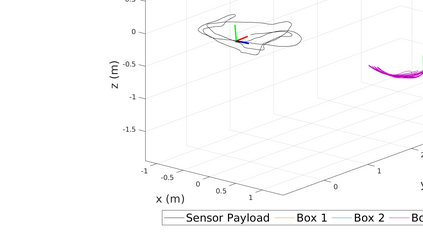
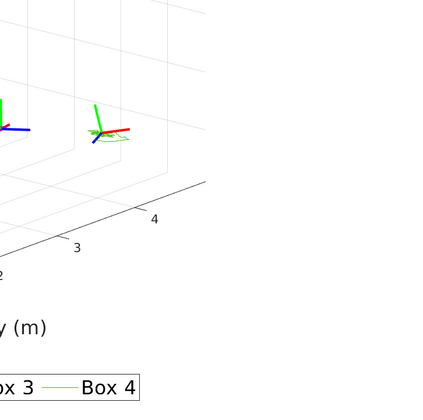
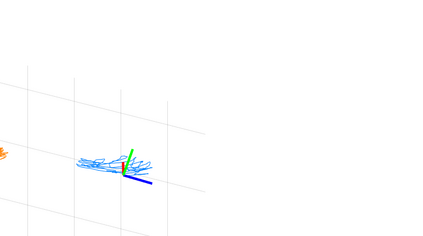
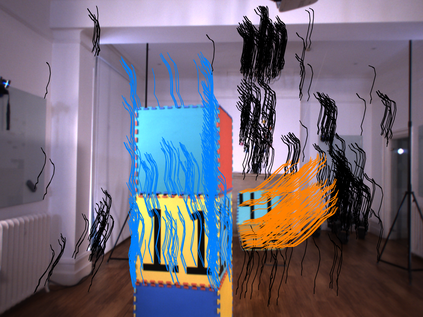
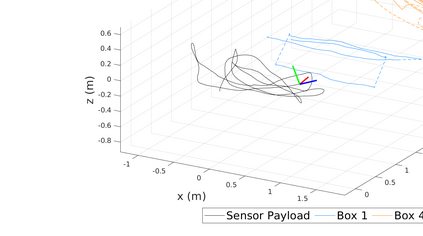
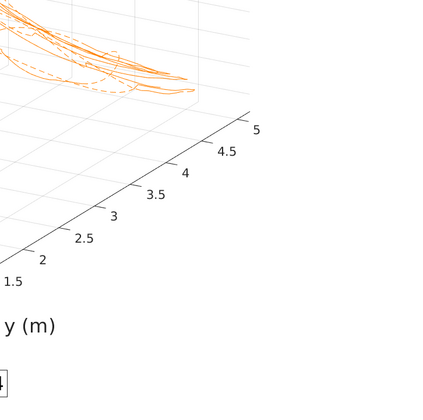
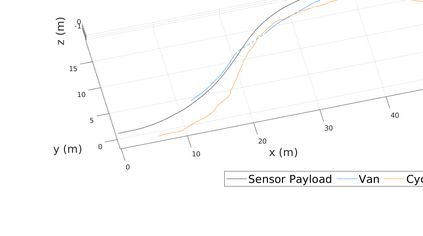
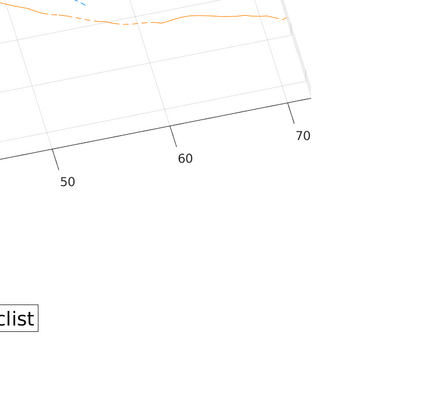
Visual motion estimation is a well-studied challenge in autonomous navigation. Recent work has focused on addressing multimotion estimation in highly dynamic environments. These environments not only comprise multiple, complex motions but also tend to exhibit significant occlusion. Estimating third-party motions simultaneously with the sensor egomotion is difficult because an object's observed motion consists of both its true motion and the sensor motion. Most previous works in multimotion estimation simplify this problem by relying on appearance-based object detection or application-specific motion constraints. These approaches are effective in specific applications and environments but do not generalize well to the full multimotion estimation problem (MEP). This paper presents Multimotion Visual Odometry (MVO), a multimotion estimation pipeline that estimates the full SE(3) trajectory of every motion in the scene, including the sensor egomotion, without relying on appearance-based information. MVO extends the traditional visual odometry (VO) pipeline with multimotion segmentation and tracking techniques. It uses physically founded motion priors to extrapolate motions through temporary occlusions and identify the reappearance of motions through motion closure. Evaluations on real-world data from the Oxford Multimotion Dataset (OMD) and the KITTI Vision Benchmark Suite demonstrate that MVO achieves good estimation accuracy compared to similar approaches and is applicable to a variety of multimotion estimation challenges.
翻译:视觉运动的估算是自主导航中一项受到广泛研究的挑战。最近的工作侧重于在高度动态环境中解决多动估计问题。这些环境不仅包括多重、复杂的动作,而且往往表现出显著的排斥性。估计第三方运动与感官自我感动同时进行的过程很难,因为一个物体的观察运动既包括真实的动作,也包括感官运动。以前大多数多动估计工作都依靠基于外观的物体探测或具体应用的动作限制来简化这一问题。这些方法在特定应用和环境中是有效的,但并不全面概括多动估计问题(MEP)。本文介绍了多动视觉测量(MVO),多动估计(MVO),一个多动估计管道,用来估计场景中所有运动的SE(3)轨迹,包括感官自我感动,而不依赖基于外观的信息。MVO将传统的视觉测量(VO)管道扩展为多动分解和跟踪技术,从而简化运动的动作,通过临时隔离和确定运动结束运动的重新出现。从牛津多动估计(MVI)到可应用的模型(MVIGI)的精确度,对实际数据进行了评估。