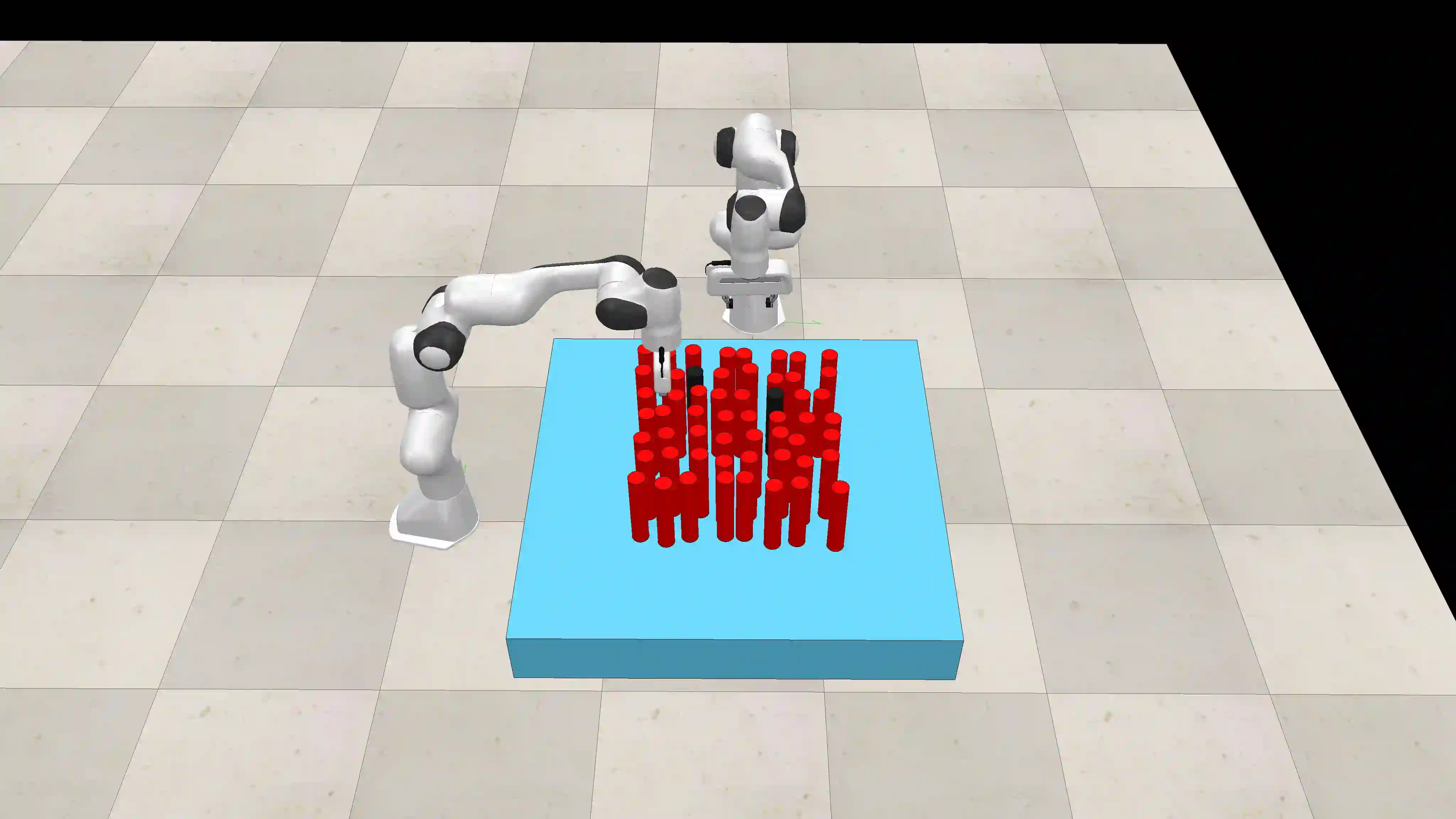
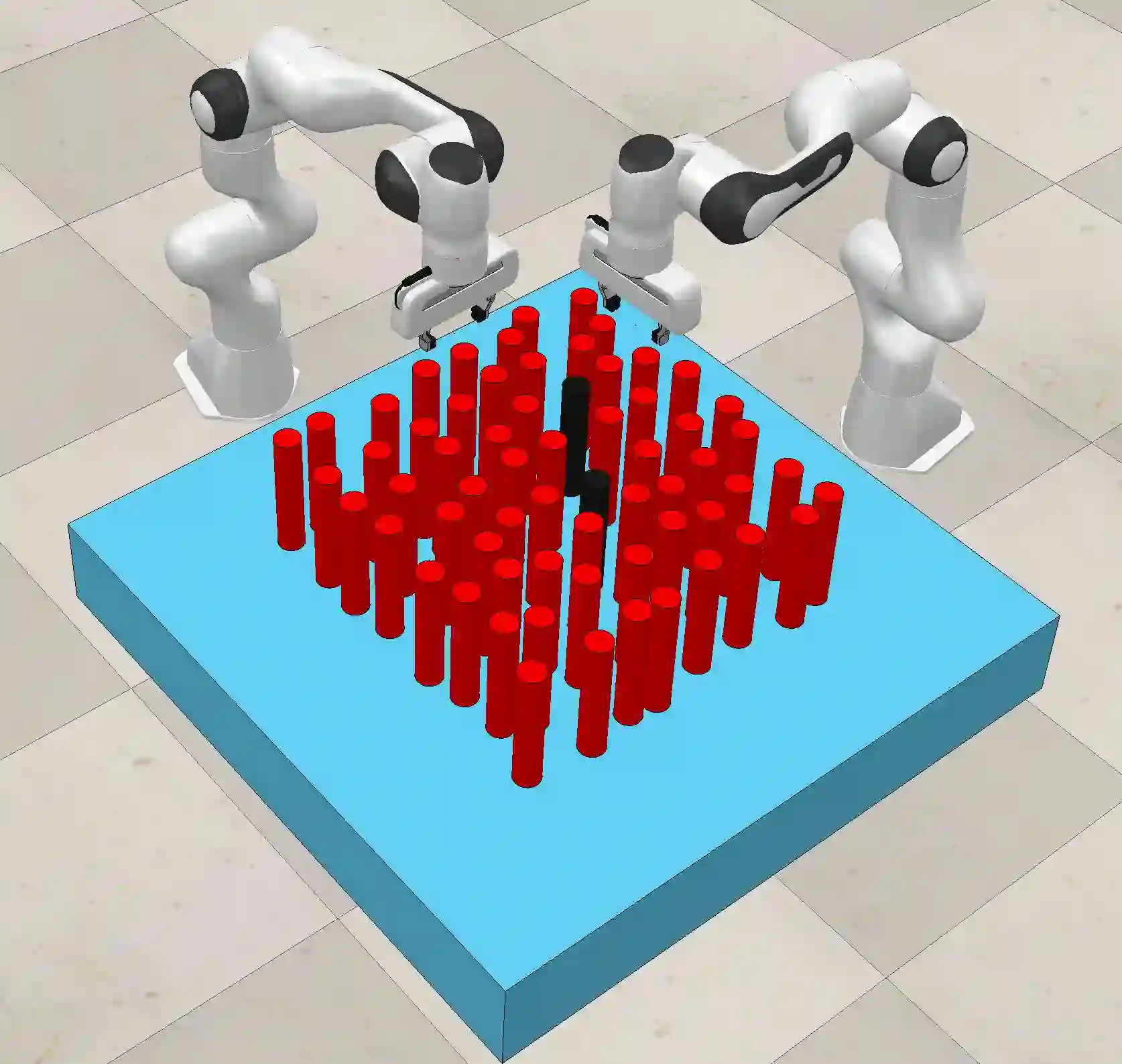
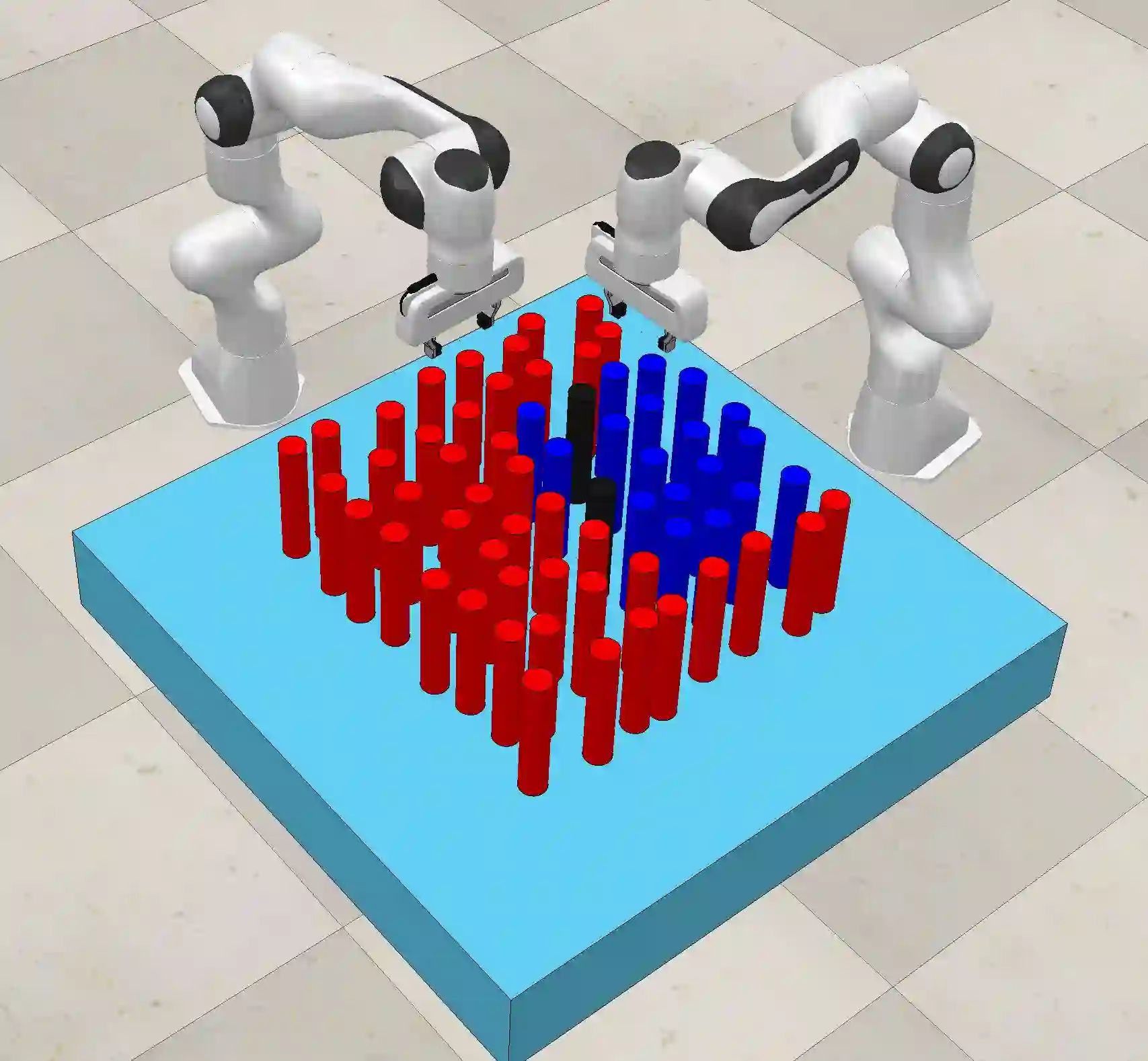
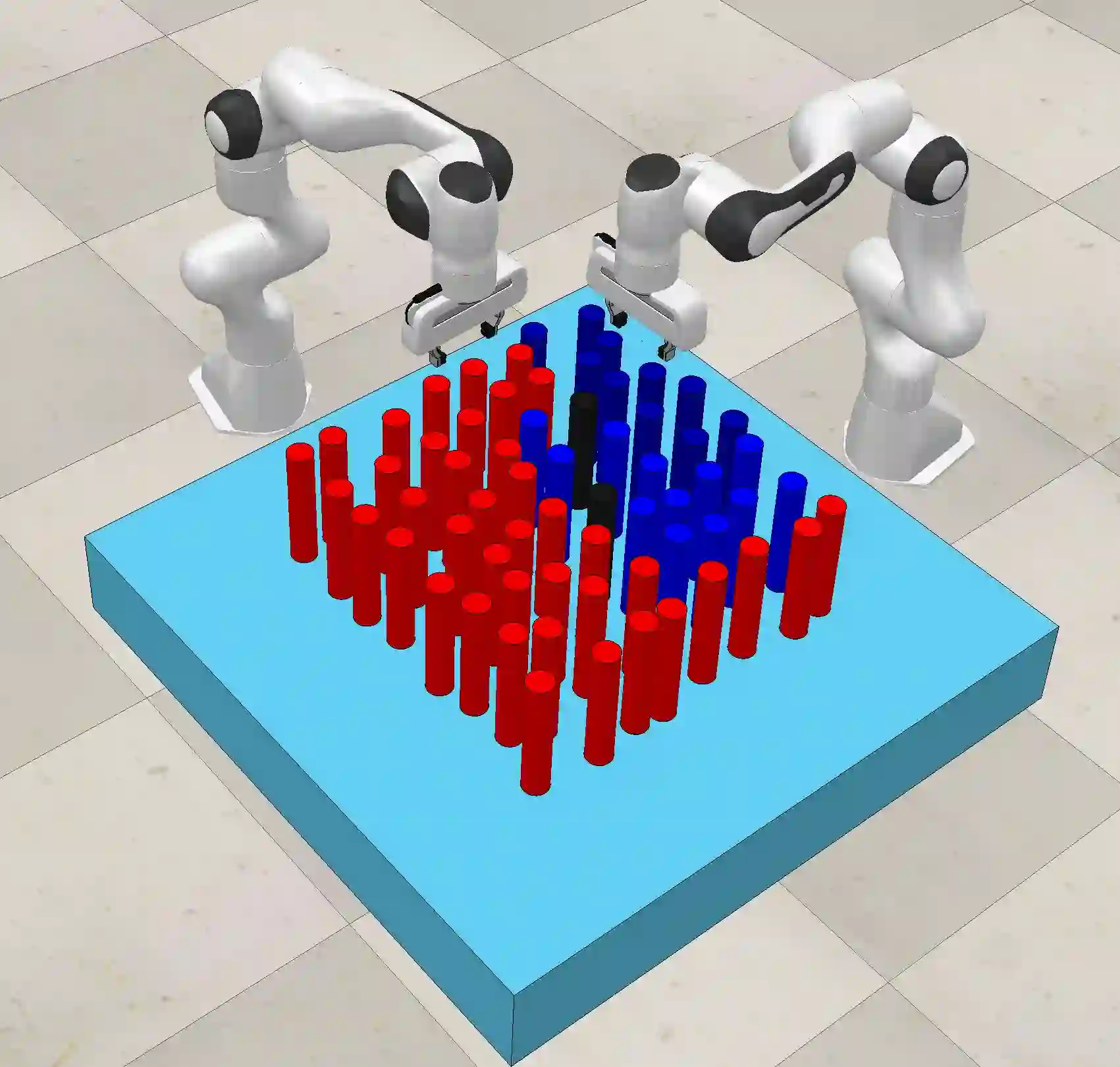
We present an AND/OR graph-based, integrated multi-robot task and motion planning approach which (i) performs task allocation coordinating the activity of a given number of robots, and (ii) is capable of handling tasks which involve an a priori unknown number of object re-arrangements, such as those involved in retrieving objects from cluttered workspaces. Such situations may arise, for example, in search and rescue scenarios, while locating/picking a cluttered object of interest. The corresponding problem falls under the category of planning in clutter. One of the challenges while planning in clutter is that the number of object re-arrangements required to pick the target object is not known beforehand, in general. Moreover, such tasks can be decomposed in a variety of ways, since different cluttering object re-arrangements are possible to reach the target object. In our approach, task allocation and decomposition is achieved by maximizing a combined utility function. The allocated tasks are performed by an integrated task and motion planner, which is robust to the requirement of an unknown number of re-arrangement tasks. We demonstrate our results with experiments in simulation on two Franka Emika manipulators.
翻译:我们提出了一个基于AD/OR图形的、综合的多机器人任务和运动规划方法,即(一) 执行任务分配,协调某一数目的机器人的活动,和(二) 能够处理一些任务,这些任务涉及数量事先未知的物体重新排列,例如从杂乱的工作空间检索物体,这种情况可能出现,例如,在搜索和救援情景中,在定位/挑选一个混合的感兴趣对象时,出现这种情况;相应的问题属于规划的类别,即:在混合规划时遇到的挑战之一是,选择目标对象所需的物体重新排列次数一般事先不为人知;此外,这种任务可以以各种方式分解,因为不同的粘结物体重新排列有可能达到目标对象;在我们的方法中,任务分配和分解位置是通过最大限度地发挥联合效用功能来实现的;分配的任务由一项综合任务和运动规划员执行,这符合两项未知的再定位实验要求。我们展示了我们关于再定位任务和再定位任务中两项未知的模拟结果。