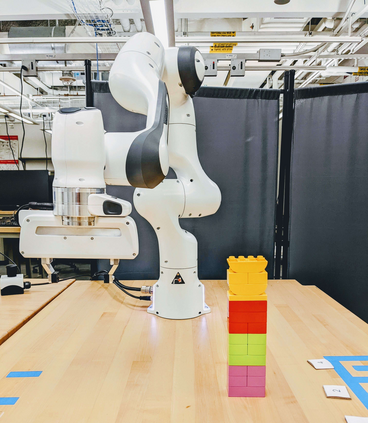
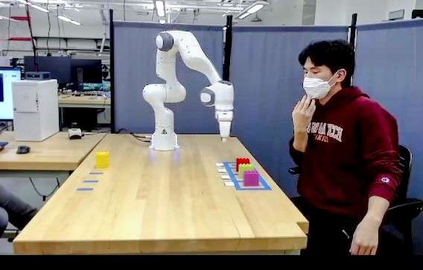
When robots interact with human partners, often these partners change their behavior in response to the robot. On the one hand this is challenging because the robot must learn to coordinate with a dynamic partner. But on the other hand -- if the robot understands these dynamics -- it can harness its own behavior, influence the human, and guide the team towards effective collaboration. Prior research enables robots to learn to influence other robots or simulated agents. In this paper we extend these learning approaches to now influence humans. What makes humans especially hard to influence is that -- not only do humans react to the robot -- but the way a single user reacts to the robot may change over time, and different humans will respond to the same robot behavior in different ways. We therefore propose a robust approach that learns to influence changing partner dynamics. Our method first trains with a set of partners across repeated interactions, and learns to predict the current partner's behavior based on the previous states, actions, and rewards. Next, we rapidly adapt to new partners by sampling trajectories the robot learned with the original partners, and then leveraging those existing behaviors to influence the new partner dynamics. We compare our resulting algorithm to state-of-the-art baselines across simulated environments and a user study where the robot and participants collaborate to build towers. We find that our approach outperforms the alternatives, even when the partner follows new or unexpected dynamics. Videos of the user study are available here: https://youtu.be/lYsWM8An18g
翻译:当机器人与人类伙伴互动时,这些伙伴往往会改变他们的行为,以回应机器人。一方面,这具有挑战性,因为机器人必须学会与动态伙伴协调。但另一方面,如果机器人理解这些动态,它可以控制自己的行为,影响人类,引导团队进行有效合作。先前的研究使机器人能够学习影响其他机器人或模拟代理人。在本文中,我们将这些学习方法扩大到现在影响人类。使人类特别难以影响的是,不仅人类对机器人作出反应,而且一个用户对机器人作出反应的方式可能随时间变化而改变,而不同的人类则会以不同方式对相同的机器人行为作出反应。因此,我们提出一种强有力的方法,学会影响改变伴侣的动态。我们的方法首先与一组伙伴一起,反复互动,并学会根据以前的状态、行动和奖励来预测当前合作伙伴的行为。接下来,我们通过对机器人与原始伙伴学习的意外轨迹进行抽样测试,然后利用这些现有的行为来影响新的伙伴的动态。我们由此而得出的算出一个模型,然后在机器人参与者之间进行模拟模型式的模型学。