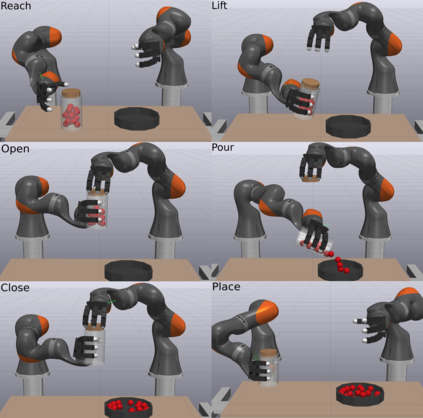
We present a convex formulation of compliant frictional contact and a robust, performant method to solve it in practice. By analytically eliminating contact constraints, we obtain an unconstrained convex problem. Our solver has proven global convergence and warm-starts effectively, enabling simulation at interactive rates. We develop compact analytical expressions of contact forces allowing us to describe our model in clear physical terms and to rigorously characterize our approximations. Moreover, this enables us not only to model point contact, but also to incorporate sophisticated models of compliant contact patches. Our time stepping scheme includes the midpoint rule, which we demonstrate achieves second order accuracy even with frictional contact. We introduce a number of accuracy metrics and show our method outperforms existing commercial and open source alternatives without sacrificing accuracy. Finally, we demonstrate robust simulation of robotic manipulation tasks at interactive rates, with accurately resolved stiction and contact transitions, as required for meaningful sim-to-real transfer. Our method is implemented in the open source robotics toolkit Drake.
翻译:我们提出了一个符合要求的摩擦接触的精密配方,并提出了一种强大的、有性能的方法来在实践中解决这一问题。通过分析消除接触限制,我们获得了一个不受限制的锥体问题。我们的解答器已证明了全球趋同和热启动是有效的,能够以互动速率进行模拟。我们开发了接触器的精密分析表达方式,使我们能够以清晰的物理术语描述我们的模型,并严格地描述我们的近似特征。此外,这也使我们不仅能够模拟点接触,而且能够纳入符合要求的接触补丁的精密模型。我们的时间跳板计划包括中点规则,我们通过摩擦接触也能够达到第二顺序的精确度。我们引入了一些精确度指标,并展示了我们的方法优于现有的商业和开放源替代物,而没有牺牲准确性。最后,我们展示了以互动速率对机器人操纵任务进行强力模拟,并准确解决了震动和接触过渡,这是有意义的模拟到真实传输所需要的。我们的方法在开放源机器人工具包Drake中实施。