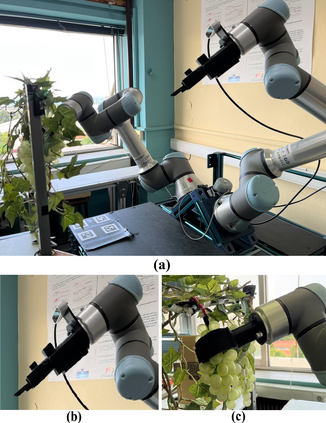
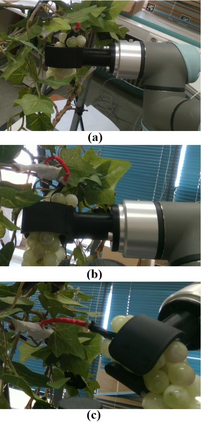
Most existing robotic harvesters utilize a unimanual approach; a single arm grasps the crop and detaches it, either via a detachment movement, or by cutting its stem with a specially designed gripper/cutter end-effector. However, such unimanual solutions cannot be applied for sensitive crops and cluttered environments like grapes and a vineyard where obstacles may occlude the stem and leave no space for the cutter's placement. In such cases, the solution would require a bimanual robot in order to visually unveil the stem and manipulate the grasped crop to create cutting affordances which is similar to the practice used by humans. In this work, a dual-arm coordinated motion control methodology for reaching a stem pre-cut state is proposed. The camera equipped arm with the cutter is reaching the stem, unveiling it as much as possible, while the second arm is moving the grasped crop towards the surrounding free-space to facilitate its stem cutting. Lab experimentation on a mock-up vine setup with a plastic grape cluster evaluates the proposed methodology, involving two UR5e robotic arms and a RealSense D415 camera.
翻译:多数现有机器人采集器采用单人方法;单臂抓住作物,通过隔离运动或用专门设计的牵引器/切开终端效应器切开其干干,但这种单臂解决办法不能应用于敏感的作物和杂乱的环境,如葡萄和葡萄园,在这些环境中,障碍可能会将干分解,为切割机的放置留下任何空间;在这种情况下,解决方案需要双臂机器人,以便视像露出干叶,并操纵所捕捉的作物,以创造与人类使用的做法相似的切开花料。在这项工作中,提出了实现干切前状态的双臂协调运动控制方法。配有切割机的照相机手臂正在接近干叶,尽可能地将其揭开,而第二臂正在将所捕捉的作物移向周围的自由空间,以便利其干割。在使用塑料葡萄集群的模拟葡萄上进行实验室实验,评估了拟议的方法,涉及两枚UR5机器人和一台RealSense D415照相机。