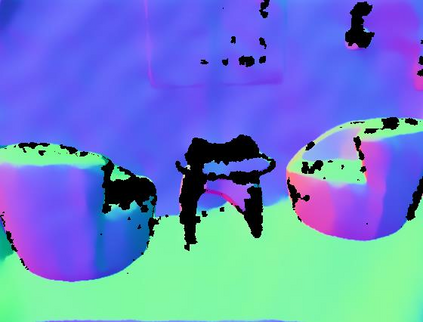
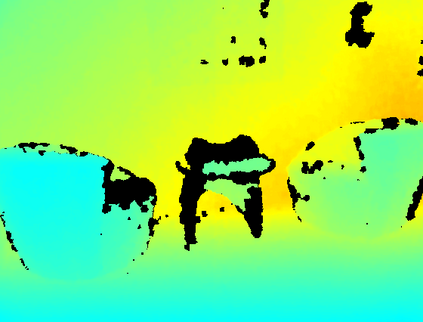
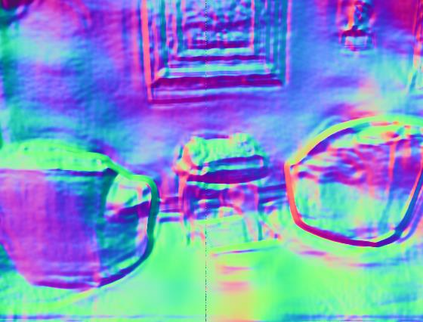
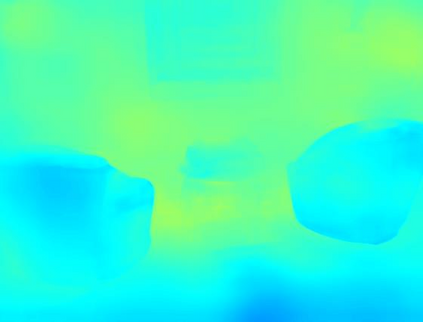
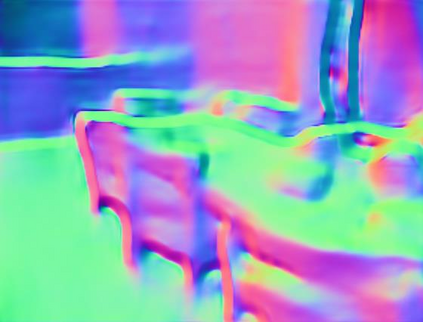
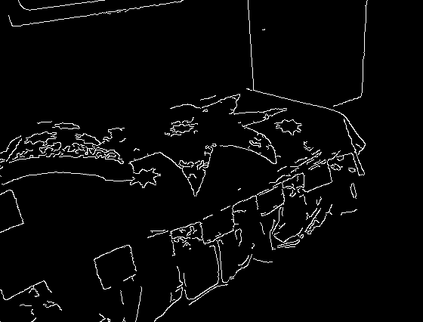
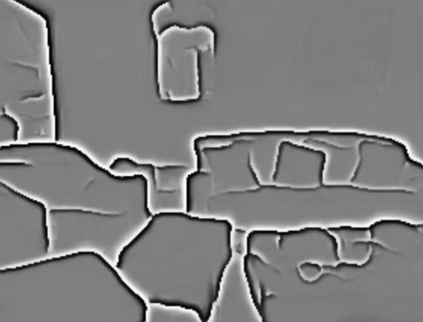
We present a novel method for single image depth estimation using surface normal constraints. Existing depth estimation methods either suffer from the lack of geometric constraints, or are limited to the difficulty of reliably capturing geometric context, which leads to a bottleneck of depth estimation quality. We therefore introduce a simple yet effective method, named Adaptive Surface Normal (ASN) constraint, to effectively correlate the depth estimation with geometric consistency. Our key idea is to adaptively determine the reliable local geometry from a set of randomly sampled candidates to derive surface normal constraint, for which we measure the consistency of the geometric contextual features. As a result, our method can faithfully reconstruct the 3D geometry and is robust to local shape variations, such as boundaries, sharp corners and noises. We conduct extensive evaluations and comparisons using public datasets. The experimental results demonstrate our method outperforms the state-of-the-art methods and has superior efficiency and robustness.
翻译:现有深度估算方法要么缺乏几何限制,要么限于难以可靠地获取几何背景,从而导致深度估算质量的瓶颈。因此,我们引入了一个简单而有效的方法,名为适应地平面常态(ASN)限制,以有效地将深度估算与几何一致性联系起来。我们的关键想法是从一组随机抽样候选人中,适应性地确定可靠的本地几何方法,以得出表面正常限制,我们测量这些条件的一致性。因此,我们的方法可以忠实地重建三维几何方法,并且能够对边界、尖锐角和噪音等局部形状变化进行强健。我们利用公共数据集进行广泛的评估和比较。实验结果表明我们的方法超越了最新的方法,并且具有更高的效率和坚固性。