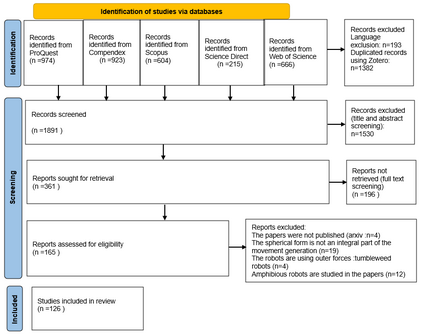
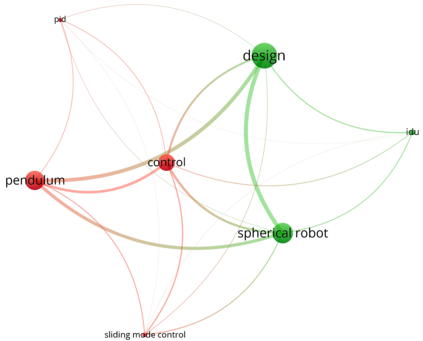
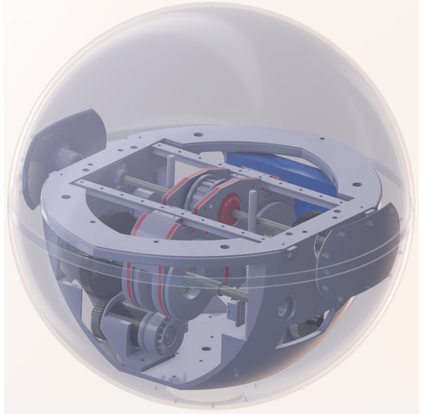
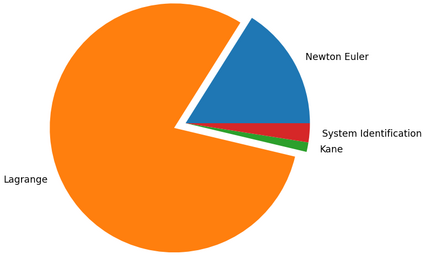
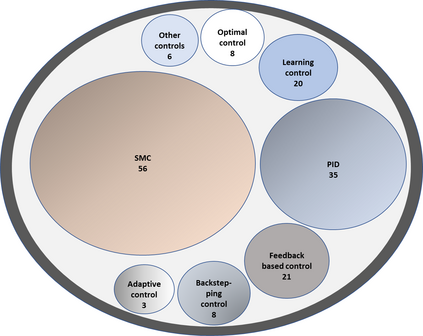
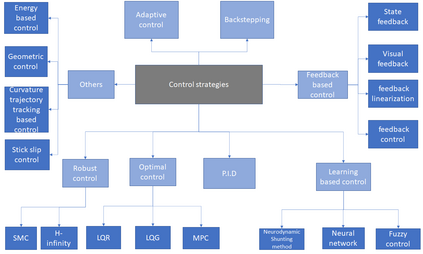
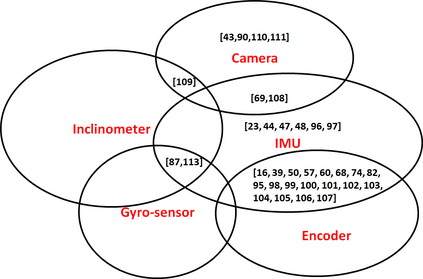
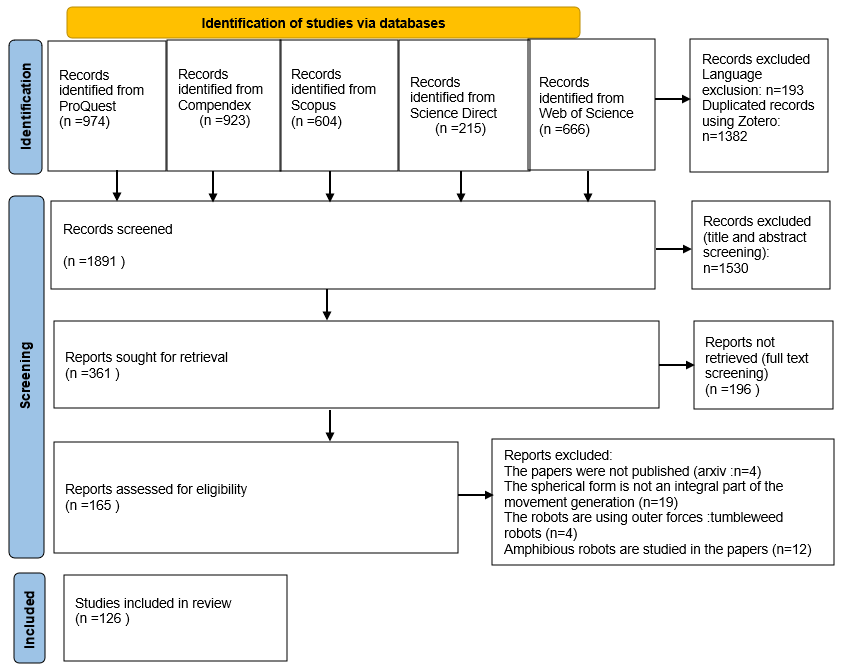
Spherical robots have garnered increasing interest for their applications in exploration, tunnel inspection, and extraterrestrial missions. Diverse designs have emerged, including barycentric configurations, pendulum-based mechanisms, etc. In addition, a wide spectrum of control strategies has been proposed, ranging from traditional PID approaches to cutting-edge neural networks. Our systematic review aims to comprehensively identify and categorize locomotion systems and control schemes employed by spherical robots, spanning the years 1996 to 2023. A meticulous search across five databases yielded a dataset of 3189 records. As a result of our exhaustive analysis, we identified a collection of novel designs and control strategies. Leveraging the insights garnered, we provide valuable recommendations for optimizing the design and control aspects of spherical robots, supporting both novel design endeavors and the advancement of field deployments. Furthermore, we illuminate key research directions that hold the potential to unlock the full capabilities of spherical robots
翻译:暂无翻译