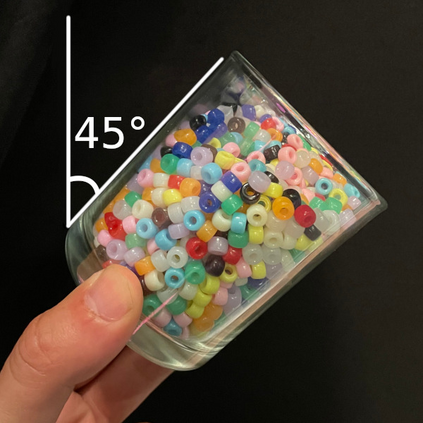
High-speed motions in pick-and-place operations are critical to making robots cost-effective in many automation scenarios, from warehouses and manufacturing to hospitals and homes. However, motions can be too fast -- such as when the object being transported has an open-top, is fragile, or both. One way to avoid spills or damage, is to move the arm slowly. We propose Grasp-Optimized Motion Planning for Fast Inertial Transport (GOMP-FIT), a time-optimizing motion planner based on our prior work, that includes constraints based on accelerations at the robot end-effector. With GOMP-FIT, a robot can perform high-speed motions that avoid obstacles and use inertial forces to its advantage. In experiments transporting open-top containers with varying tilt tolerances, whereas GOMP computes sub-second motions that spill up to 90% of the contents during transport, GOMP-FIT generates motions that spill 0% of contents while being slowed by as little as 0% when there are few obstacles, 30% when there are high obstacles and 45-degree tolerances, and 50% when there 15-degree tolerances and few obstacles.
翻译:选角和地点操作中的高速动作对于使机器人在从仓库和制造到医院和住家等许多自动化情景中具有成本效益至关重要。 但是,动作可能太快 -- -- 如所运输的物体有一个开放的顶部,是脆弱的,或两者兼而有之。 避免溢出或损坏的一个办法是缓慢移动手臂。 我们提议快速不动运输的格拉普-优化动作规划(GOMP-FIT),这是基于我们先前工作的一个时间优化动作规划器,其中包括基于机器人末效器加速的制约。 GOMP-FIT,机器人可以执行高速动作,避免障碍,使用惯性力量来达到其优势。在运送开放的集装箱时,倾斜度不一不一,而GOMP-FIT计算出在运输过程中高达90%内容的次秒动作,GOMP-FIT产生的动作,在没有多少障碍、有高阻力和45度耐力的情况下,其速度会放慢为30%,而在有15度和低度障碍时则会放慢50%。