【泡泡一分钟】利用三个平面同时标定2D激光雷达和机器人的运动学参数
每天一分钟,带你读遍机器人顶级会议文章
标题:SCALAR - Simultaneous Calibration of 2D Laser and Robot's Kinematic Parameters Using Three Planar Constraints
作者:Teguh Santoso Lembono, Francisco Su´arez-Ruiz, and Quang-Cuong Pham
来源:IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS),2018
编译:黄思宇
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

随着工业机器人被越来越多地应用于各种应用中,机器人的精度变的尤为重要,因此需要校准机器人的运动学参数和测量系统的外部参数。然而,现有的校准方法要么太麻烦,要么需要其他昂贵的外部测量系统,例如激光跟踪器或测量自旋臂。在本文中,我们提出了SCALAR,一种可以同时改善6-DoF机器人的运动学参数以及连接到机器人的2D激光测距仪(LRF)的外部参数的校准方法。在机器人周围放置三个平面,对于每个平面,机器人在其面前移动几个姿势,使得2D激光雷达的光线与相应的平面相交。然后使用几何平面约束通过Levenberg-Marquardt非线性优化算法来优化校准参数。我们通过仿真证明,SCALAR可以将机器人系统的平均位置和方向误差从14.6 mm和4.05°减小到0.09 mm和0.02°。
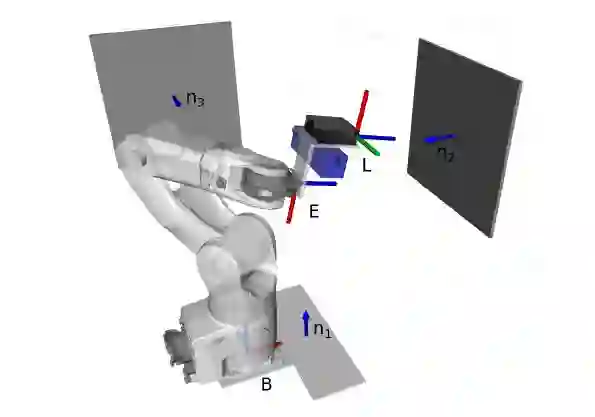
图1 测量设备示意图

Abstract
Industrial robots are increasingly used in various applications where the robot accuracy becomes very important, hence calibrations of the robot’s kinematic parameters and the measurement system’s extrinsic parameters are required. However, the existing calibration approaches are either too cumbersome or require another expensive external measurement system such as laser tracker or measurement spinarm. In this paper, we propose SCALAR, a calibration method to simultaneously improve the kinematic parameters of a 6-DoF robot and the extrinsic parameters of a 2D Laser Range Finder (LRF) that is attached to the robot. Three flat planes are placed around the robot, and for each plane the robot moves to several poses such that the LRF’s ray intersect the respective plane. Geometric planar constraints are then used to optimize the calibration parameters using Levenberg-Marquardt nonlinear optimization algorithm. We demonstrate through simulations that SCALAR can reduce the average position and orientation errors of the robot system from 14.6 mm and 4.05°to 0.09 mm and 0.02°.
如果你对本文感兴趣,请点击点击阅读原文下载完整文章,如想查看更多文章请关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
百度网盘提取码:7byq
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





