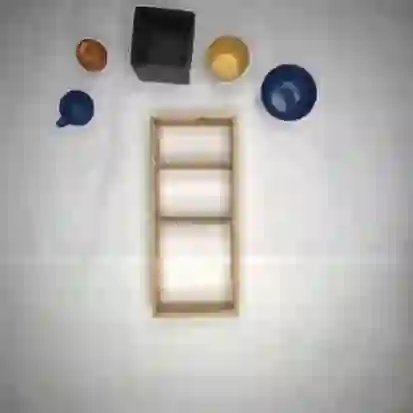
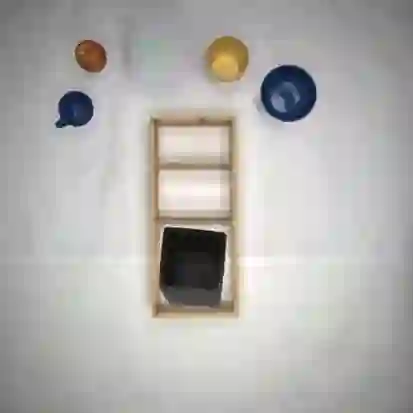
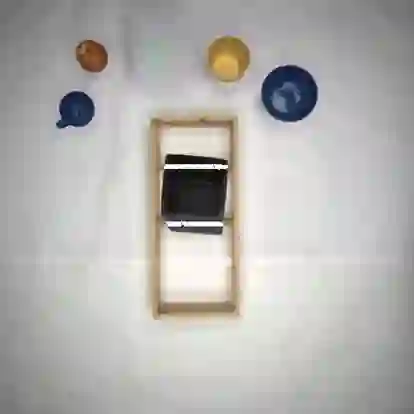
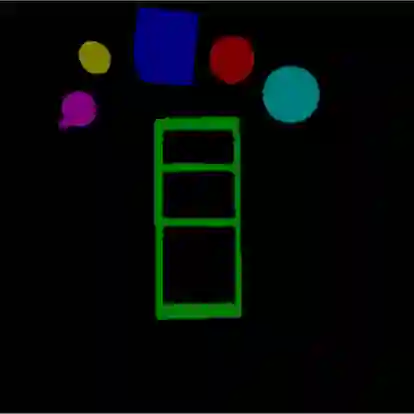
Traditional AI-planning methods for task planning in robotics require strictly defined symbolic structural elements. While powerful in well-defined scenarios, setting this up requires substantial effort. Different from this, most everyday planning tasks are solved by humans intuitively, using mental imagery of the different planning steps. Here we suggest that the same approach can be used for robots, too, in cases which require only limited execution accuracy. In the current study, we propose a novel sub-symbolic method called Simulated Mental Imagery for Planning (SiMIP), which consists of several steps: perception, simulated action, success-checking and re-planning performed on 'imagined' images. We show that it is possible this way to implement mental imagery-based planning in an algorithmically sound way by combining regular convolutional neural networks and generative adversarial networks. With this method, the robot acquires the capability to use the initially existing scene to generate action plans without symbolic domain descriptions, hence, without the need to define an explicit representation of the environment. We create a dataset from real scenes for a packing problem of having to correctly place different objects into different target slots. This way efficiency and success rate of this algorithm could be quantified.
翻译:用于机器人任务规划的传统人工智能规划方法需要严格定义的象征性结构要素。 虽然在明确界定的情景中需要强大的结构要素, 建立这一功能需要大量的努力。 与此不同, 大多数日常的规划任务都是由人类通过直觉解决的, 使用不同规划步骤的心理图像。 我们在这里建议, 在只需要有限的执行精确度的情况下, 也可以对机器人使用同样的方法。 在目前的研究中, 我们提议一种叫作“ 规划模拟精神图像模拟( SiMIP) ” 的新颖的子同步方法, 由几个步骤组成: 感知、 模拟动作、 成功校验和在“ 想象” 图像上完成的重新规划。 我们通过将常规的革命神经网络和基因对抗网络结合起来, 来以逻辑上稳健的方式实施基于精神图像的规划是可能的。 使用这种方法, 机器人获得在最初的场景中生成行动计划的能力, 而不需要象征性的域描述, 因此, 不需要界定环境的明确描述。 我们从真实的场景中创建数据集, 以便把不同对象正确置于不同的目标位置上, 能够量化这种效率和成功的方式。