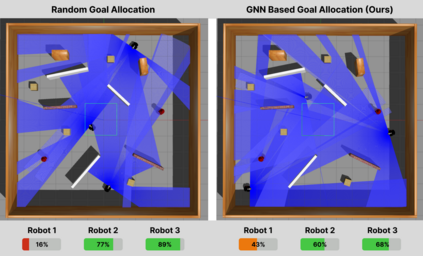
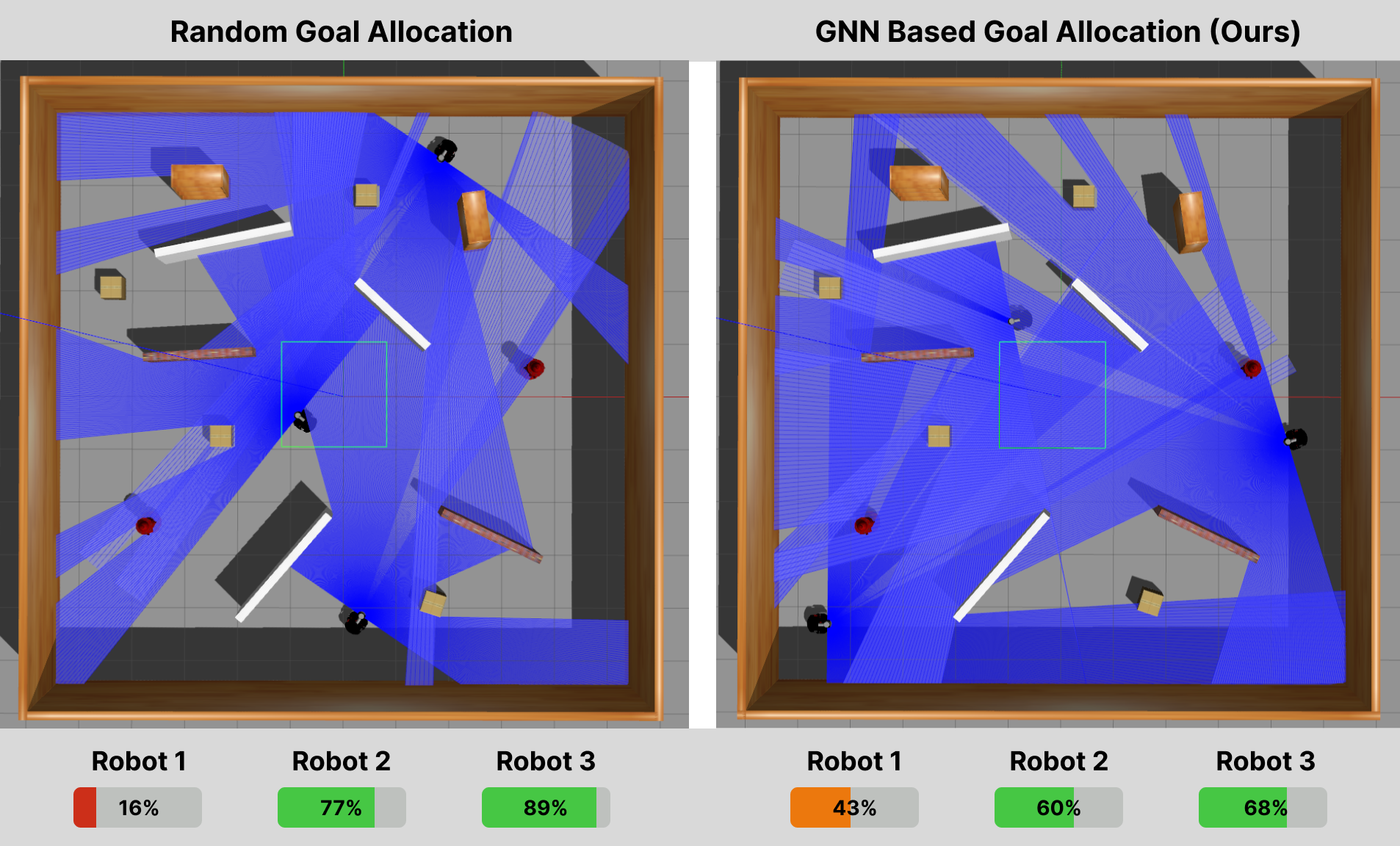
Resource-constrained robots often suffer from energy inefficiencies, underutilized computational abilities due to inadequate task allocation, and a lack of robustness in dynamic environments, all of which strongly affect their performance. This paper introduces DREAM - Decentralized Reinforcement Learning for Exploration and Efficient Energy Management in Multi-Robot Systems, a comprehensive framework that optimizes the allocation of resources for efficient exploration. It advances beyond conventional heuristic-based task planning as observed conventionally. The framework incorporates Operational Range Estimation using Reinforcement Learning to perform exploration and obstacle avoidance in unfamiliar terrains. DREAM further introduces an Energy Consumption Model for goal allocation, thereby ensuring mission completion under constrained resources using a Graph Neural Network. This approach also ensures that the entire Multi-Robot System can survive for an extended period of time for further missions compared to the conventional approach of randomly allocating goals, which compromises one or more agents. Our approach adapts to prioritizing agents in real-time, showcasing remarkable resilience against dynamic environments. This robust solution was evaluated in various simulated environments, demonstrating adaptability and applicability across diverse scenarios. We observed a substantial improvement of about 25% over the baseline method, leading the way for future research in resource-constrained robotics.
翻译:暂无翻译