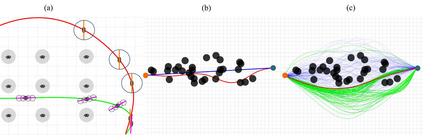
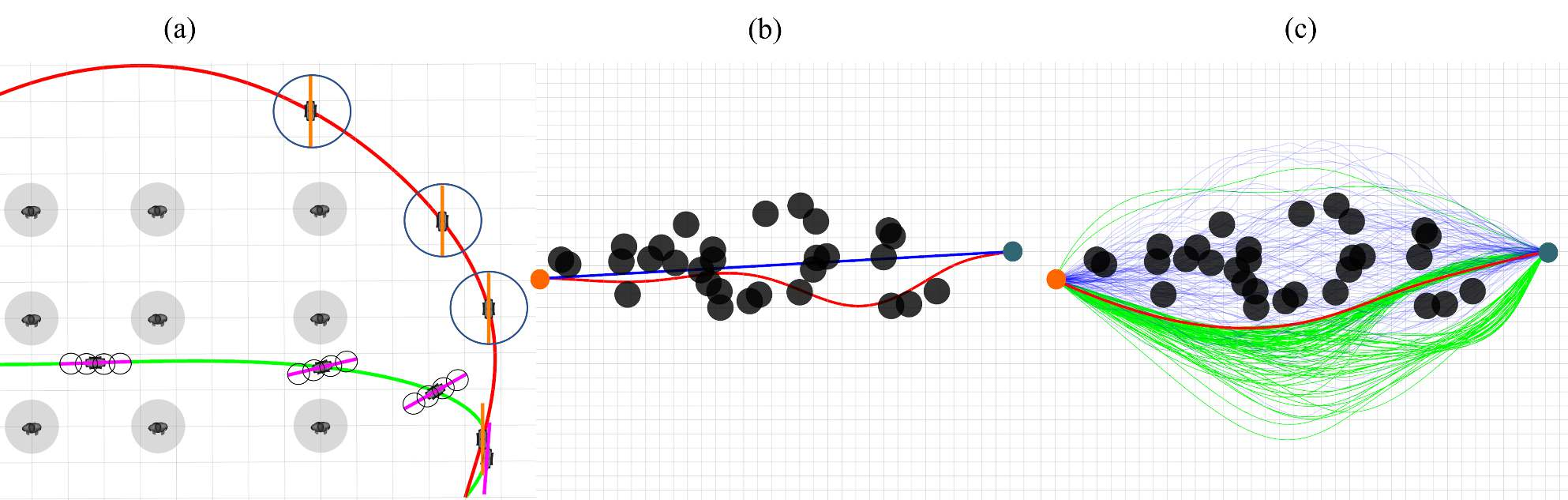
We present a batch trajectory optimizer that can simultaneously solve hundreds of different instances of the problem in real-time. We consider holonomic robots but relax the assumption of circular base footprint. Our main algorithmic contributions lie in: (i) improving the computational tractability of the underlying non-convex problem and (ii) leveraging batch computation to mitigate initialization bottlenecks and improve solution quality. We achieve both goals by deriving a multi-convex reformulation of the kinematics and collision avoidance constraints. We exploit these structures through an Alternating Minimization approach and show that the resulting batch operation reduces to computing just matrix-vector products that can be trivially accelerated over GPUs. We improve the state-of-the-art in three respects. First, we improve quality of navigation (success-rate, tracking) as compared to baseline approach that relies on computing a single locally optimal trajectory at each control loop. Second, we show that when initialized with trajectory samples from a Gaussian distribution, our batch optimizer outperforms state-of-the-art cross-entropy method in solution quality. Finally, our batch optimizer is several orders of magnitude faster than the conceptually simpler alternative of running different optimization instances in parallel CPU threads. \textbf{Codes:} \url{https://tinyurl.com/a3b99m8}
翻译:我们提出了一个批量轨迹优化器,可以同时实时解决数百个不同的问题。 我们考虑holoomic机器人,但放松对循环基足迹的假设。 我们的主要算法贡献在于:(一) 改善基本非 convex 问题的计算可移动性, (二) 利用批量计算来减轻初始化瓶颈, 提高解决方案质量。 我们通过对运动和避免碰撞的限制进行多功能化的多节流重新组合, 实现这两个目标。 我们利用这些结构, 我们通过交替最小化方法, 并表明由此产生的批量操作会减少仅仅计算在 GPUs 上可能略微加速的矩阵- 矢量产品。 我们的主要算法贡献在于:(一) 在三个方面改进最先进的技术。 首先, 我们提高导航质量( 成功率, 跟踪) 与基线方法相比, 在每个控制循环中计算单一的本地最佳轨迹。 其次, 我们展示, 当从高星分布的轨迹样本开始, 我们的批量优化器超越了系统, 显示我们的批量优化/ 测试状态, 在解决方案质量上, 最快速地优化的C级/ 级同步 优化 优化 。