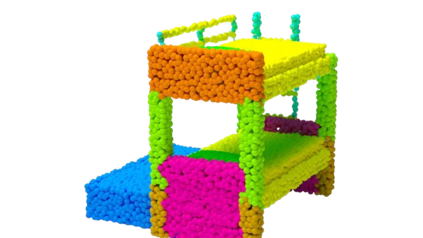
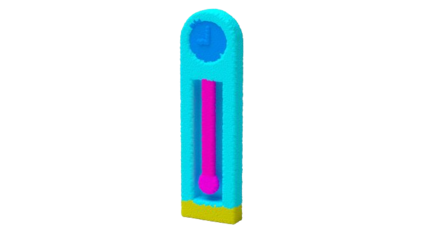
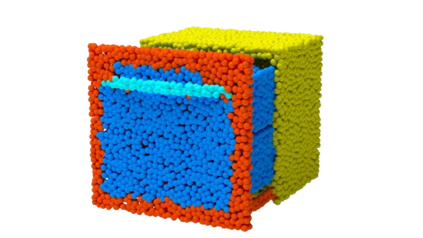
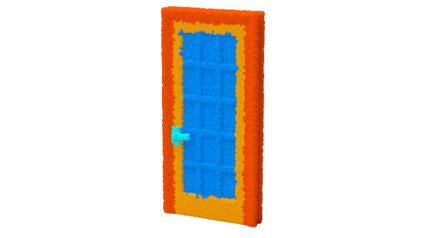
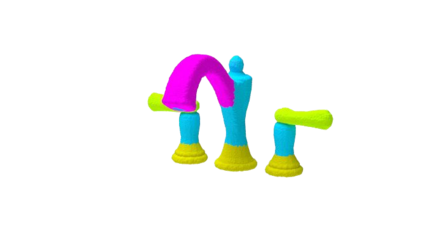
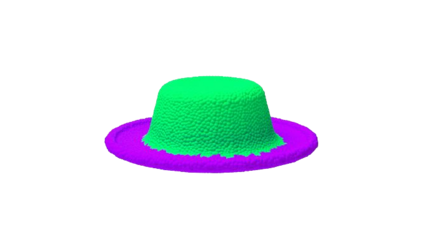
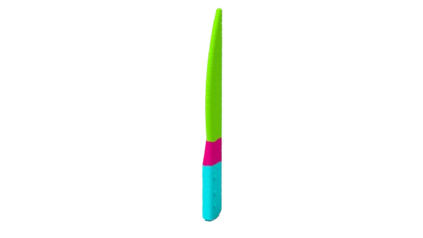
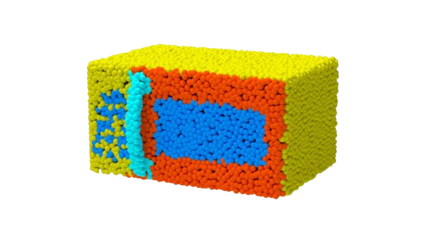
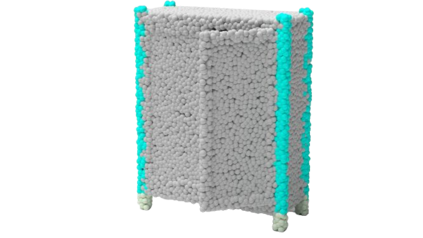
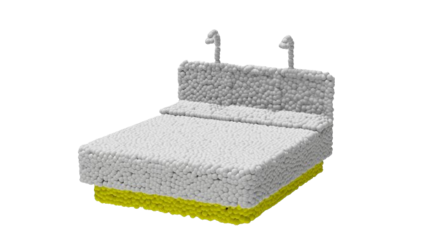
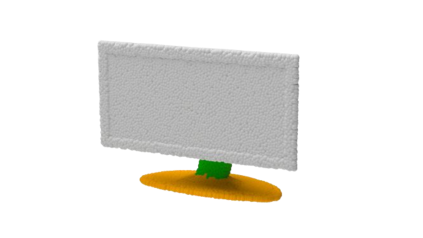
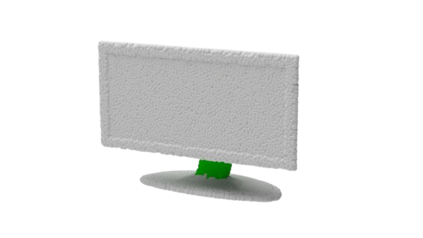
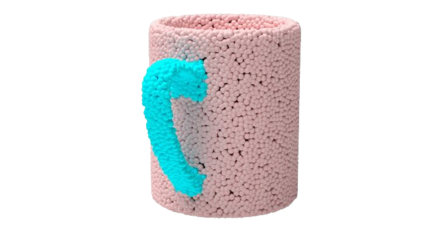
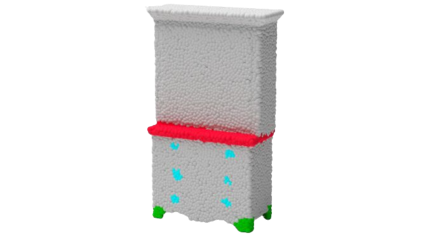
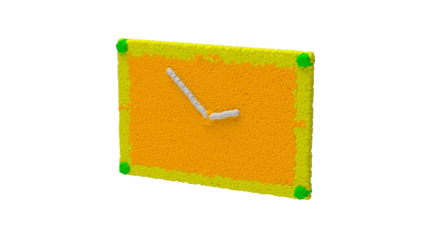
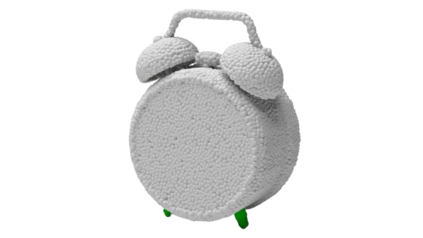
Parts represent a basic unit of geometric and semantic similarity across different objects. We argue that part knowledge should be composable beyond the observed object classes. Towards this, we present 3D Compositional Zero-shot Learning as a problem of part generalization from seen to unseen object classes for semantic segmentation. We provide a structured study through benchmarking the task with the proposed Compositional-PartNet dataset. This dataset is created by processing the original PartNet to maximize part overlap across different objects. The existing point cloud part segmentation methods fail to generalize to unseen object classes in this setting. As a solution, we propose DeCompositional Consensus, which combines a part segmentation network with a part scoring network. The key intuition to our approach is that a segmentation mask over some parts should have a consensus with its part scores when each part is taken apart. The two networks reason over different part combinations defined in a per-object part prior to generate the most suitable segmentation mask. We demonstrate that our method allows compositional zero-shot segmentation and generalized zero-shot classification, and establishes the state of the art on both tasks.
翻译:部件代表不同对象的几何和语义相似性的基本单位 。 我们主张部分知识应可在已观测对象分类之外进行合成。 为此, 我们提出 3D 构成零光学习, 作为语义分解从可见到看不见的物体分类的一个问题 。 我们提供结构化研究, 将任务与拟议组成- PartNet 数据集设定基准 。 这个数据集是通过处理 原始 PartNet 创建的, 使不同对象之间的部分重叠最大化 。 现有的点云分解方法无法在此设置中概括为看不见的物体分类 。 作为解决方案, 我们提出 分解共识, 将一个部分分解网络与一个部分评分网络结合起来 。 我们的方法的关键直觉是, 当每个部分分开时, 某些部分的分解面遮蔽应具有其部分分数的共识 。 在生成最合适的分解遮蔽面之前, 单个对象定义的不同部分的组合的两个原因 。 我们证明我们的方法允许组合零分解和通用的零分解分类, 并在两个任务上建立艺术状态 。