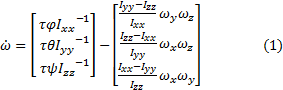
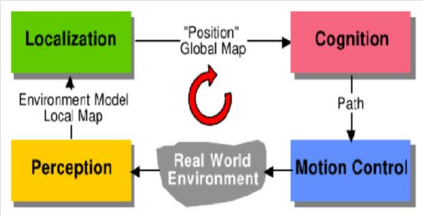
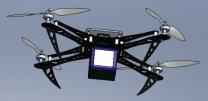
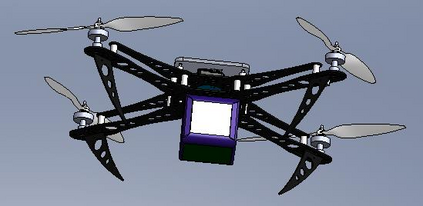
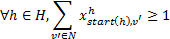
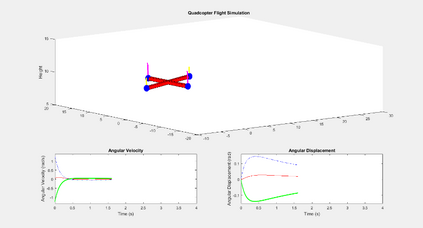
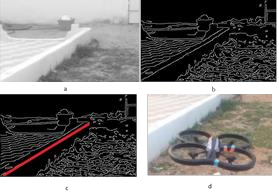
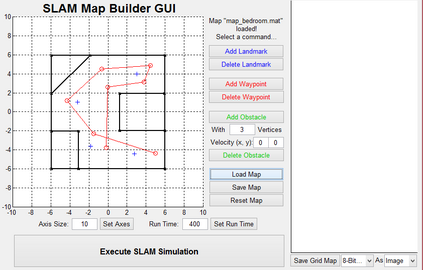
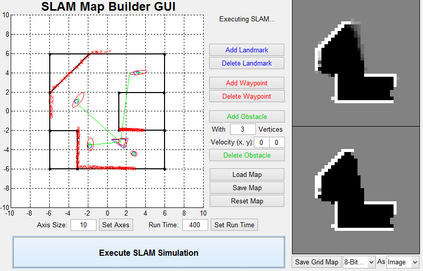
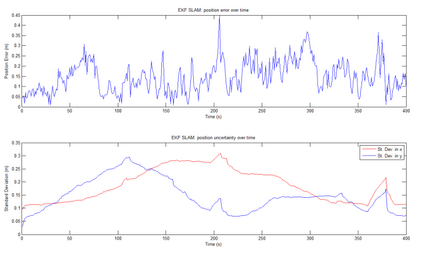
Unmanned Aerial Vehicle (UAV) quadrotor is a UAV with four rotors. The quadrotor control is a difficult task because the four-wheel system is inefficient. The purpose of this paper is to provide specifications and implement a separate quad system that integrates data from the camera and IMU (Inertial Measurement Unit) to allow high -resolution optical transmission. In this paper, a separate quad system was proposed. The system specification is specified. The system application introduced the SolidWorks design of the system, the mathematical modeling of the pickup and delivery (PDP) problem. The simulation results using MATLB for model implementation and the simultaneous localization and mapp ing (SLAM) were presented using the Extended Kalman (EKF-SLAM) filter algorithm used to make the system independent. Experimental results were introduced to use the candy edge detection algorithm.
翻译:无人驾驶航空飞行器(UAV)二次钻探器是一个拥有四个转子的无人驾驶航空器,由于四轮系统效率低下,这种四轮控制是一项艰巨的任务,本文件的目的是提供规格,实施单独的四轮系统,将相机和惯性测量装置(IMU)的数据整合成一个单独的四轮系统,以便进行高分辨率光学传输。在本文中,提出了单独的四轮系统。系统规格得到了具体规定。系统应用程序引入了系统SolidWorks设计、接货和交付问题的数学建模(PDP)问题。模型实施时使用MATLB的模拟结果以及同时的本地化和地图定位(SLAM),使用了扩展的Kalman(EKF-SLAM)过滤算法使系统独立。在使用糖果边缘检测算法时引入了实验结果。